

Target object recognition method and device and operation equipment
A technology for target objects and operating equipment, applied in the field of unmanned aerial vehicles, can solve problems such as poor safety of operating equipment, and achieve the effect of improving reliability, stability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] According to an embodiment of the present invention, an embodiment of a method for identifying a target object is provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and , although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
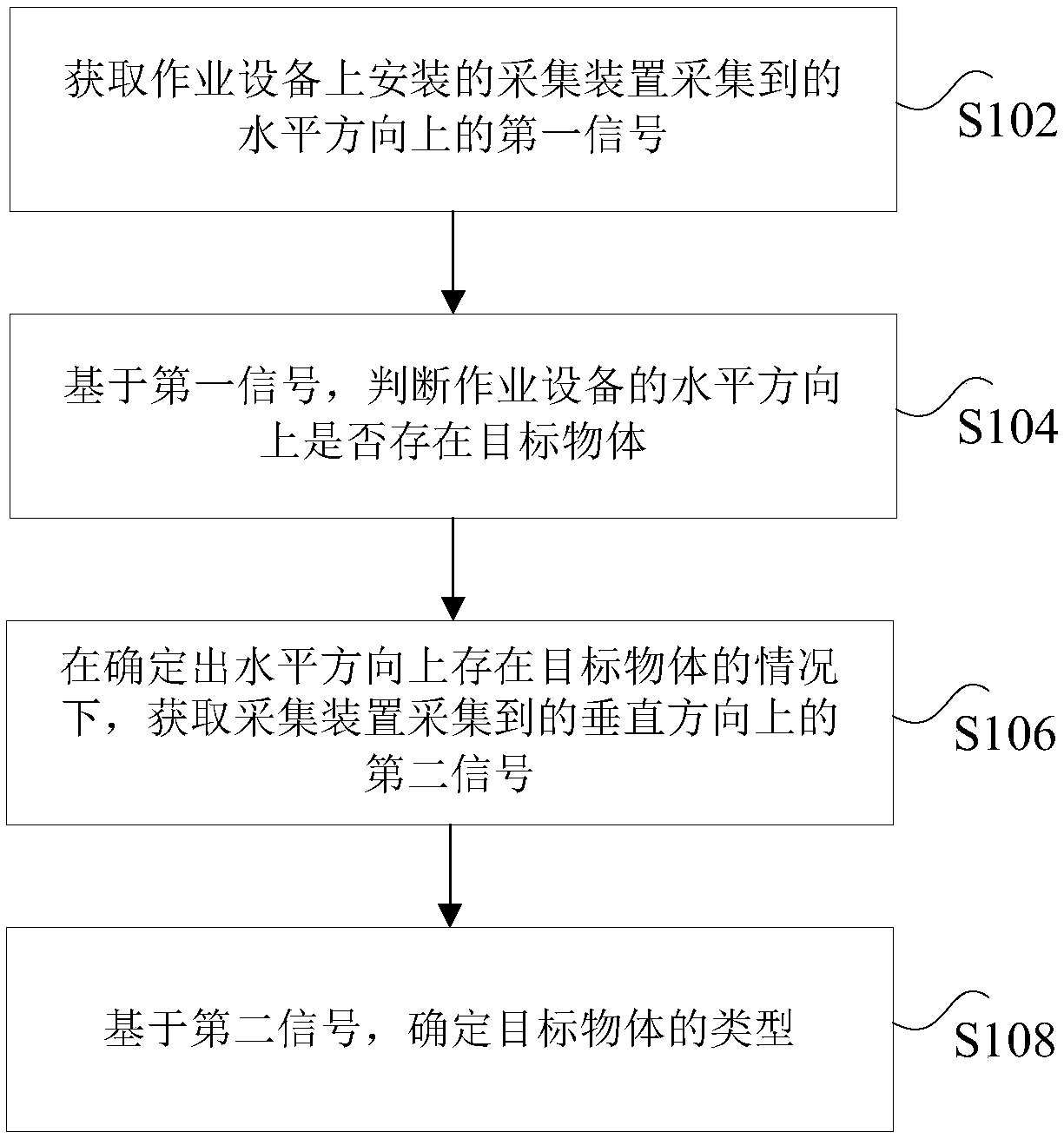
[0036] figure 1 is a flow chart of a target object recognition method according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0037] Step S102, acquiring the first signal in the horizontal direction collected by the collection device installed on the operation equipment.
[0038] Specifically, the above-mentioned operating equipment may be a plant protection unmanned aerial vehicle, and acquisition devices are installed on the horiz...
Embodiment 2
[0077] According to an embodiment of the present invention, an embodiment of an identification device for a target object is provided.
[0078] Figure 8 is a schematic diagram of an identification device for a target object according to an embodiment of the present invention, such as Figure 8 As shown, the device includes:
[0079] The first acquisition module 82 is configured to acquire the first signal in the horizontal direction collected by the acquisition device installed on the operation equipment.
[0080] Specifically, the above-mentioned operating equipment may be a plant protection unmanned aerial vehicle, and acquisition devices are installed on the horizontal and vertical directions of the unmanned aerial vehicle body, which can collect signals used to characterize the environmental information of the surrounding environment of no one. The acquisition device may be Laser radar, infrared, vision-based devices or millimeter-wave radar, the present invention does ...
Embodiment 3
[0091] According to an embodiment of the present invention, an embodiment of working equipment is provided.
[0092] Figure 9 is a schematic diagram of a working device according to an embodiment of the present invention, such as Figure 9 As shown, the operating equipment includes:
[0093] The collecting device 92 is used for collecting the first signal in the horizontal direction and the second signal in the vertical direction.
[0094] Specifically, the above-mentioned operating equipment may be a plant protection unmanned aerial vehicle, and acquisition devices are installed on the horizontal and vertical directions of the unmanned aerial vehicle body, which can collect signals used to characterize the environmental information of the surrounding environment of no one. The acquisition device may be Laser radar, infrared, vision-based devices or millimeter-wave radar, the present invention does not specifically limit this, as long as the environmental information of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More