

Gait generation and optimization method for biped robot
A biped robot and optimization method technology, applied in the field of humanoid robots, can solve problems such as occupying palm space, increasing hand weight, reducing flexibility, etc., to achieve the effects of reducing energy consumption, simplifying the planning process, and improving universality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
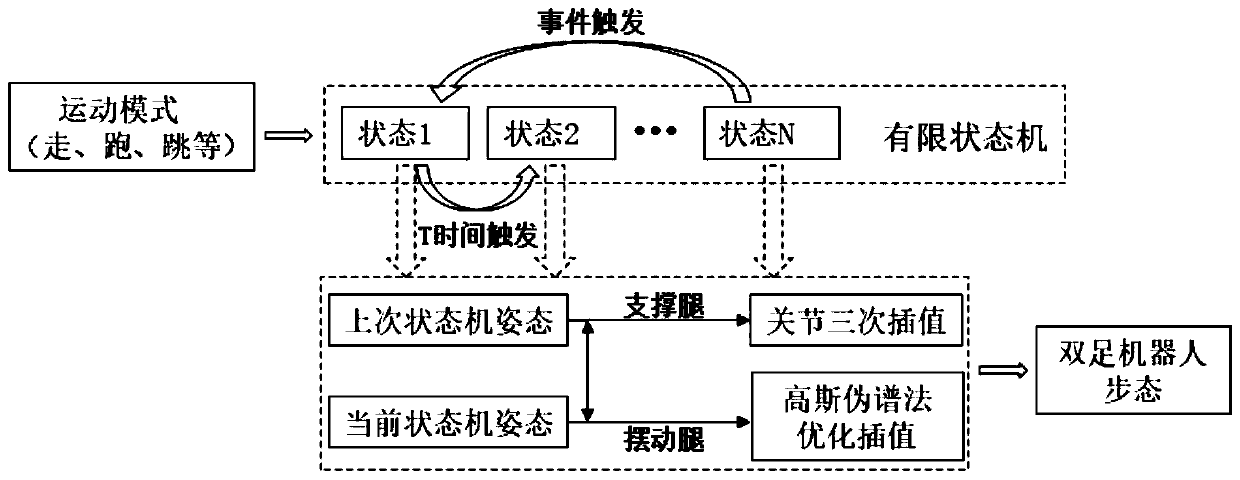
[0034] A biped robot gait generation and optimization method figure 1 Shown:
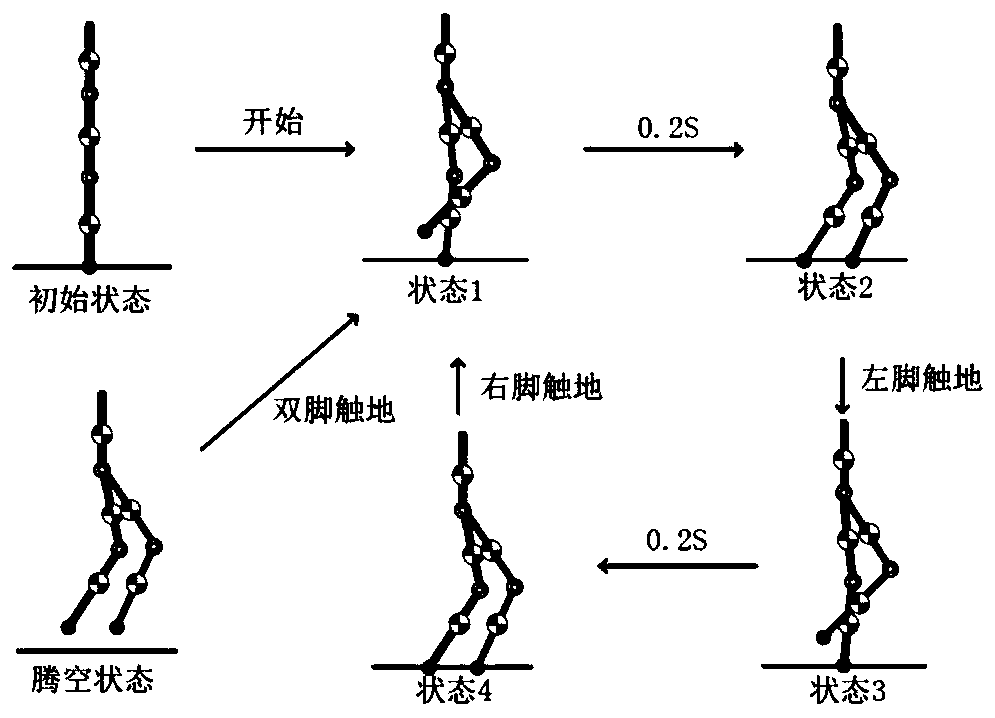
[0035] Such as figure 2 As shown, the biped robot can be divided into six states according to the different supporting legs during the walking process, which are the initial state of the robot standing on the ground with both feet, the state of only the right foot supporting 1, and the state of the left foot touching the ground. 2. The state of the left foot support 3, the state of the right foot touching the ground 4 and the state of flying, set the joint target angle and walking reference speed through the state inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More