

Robot and its steering control method
A steering control and robot technology, applied in steering mechanism, non-deflectable wheel steering, vehicle components, etc., can solve problems such as robot steering offset, achieve effective obstacle avoidance, precise and stable steering, and avoid rotation, translation or offset Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The following will clearly and completely describe the technical solutions in the embodiments of the present application with reference to the drawings in the embodiments of the present application. Obviously, the described embodiments are only some of the embodiments of the present application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
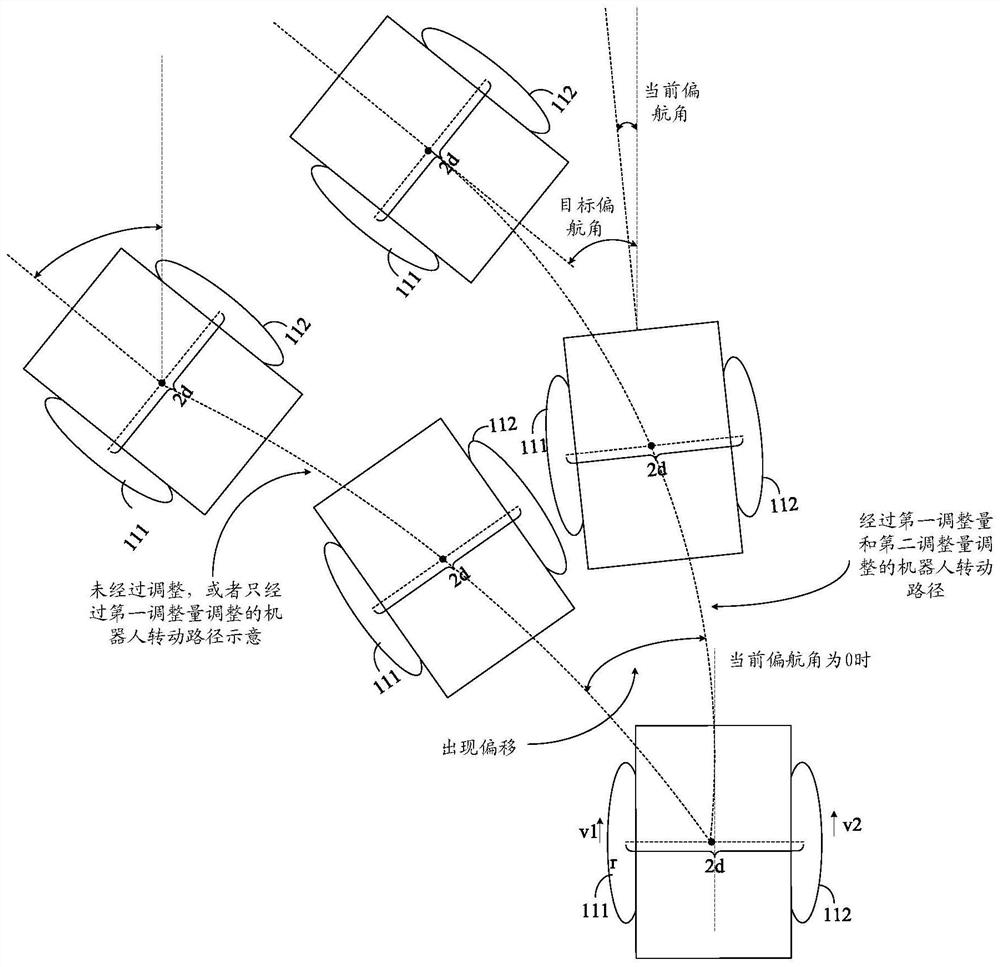
[0020] In the prior art, there are differences in the manufacturing and assembly of most robots, such as the design, manufacture, and structural installation of various parts, especially the motors. When the machine turns, due to the differences in the design and installation of the motors and wheels on both sides of the robot. The steering speed of the wheels on both sides is different from the design speed, which will easily cause the robot to deviate and mak...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More