

Servo system non-switching attraction repetitive control method adopting equivalent disturbance compensation
An equivalent disturbance and servo system technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve the problems of unable to suppress periodic disturbances and low tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0118] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
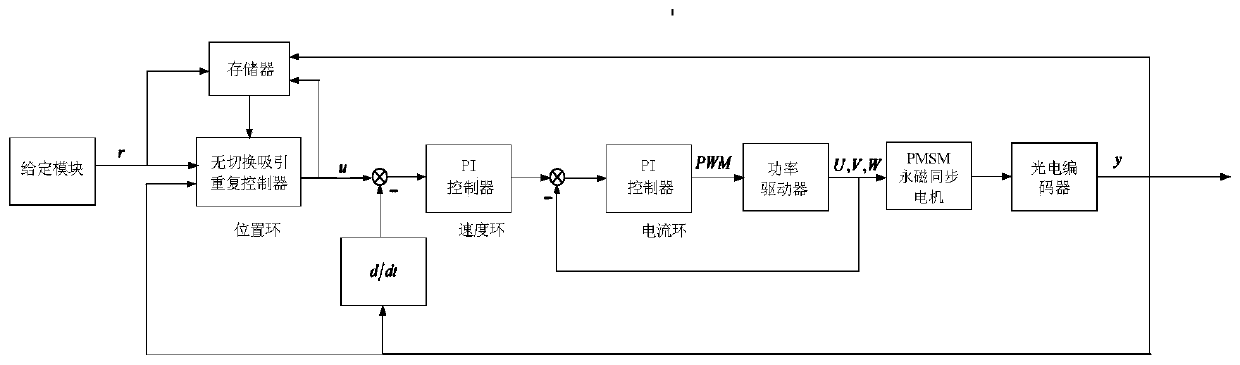
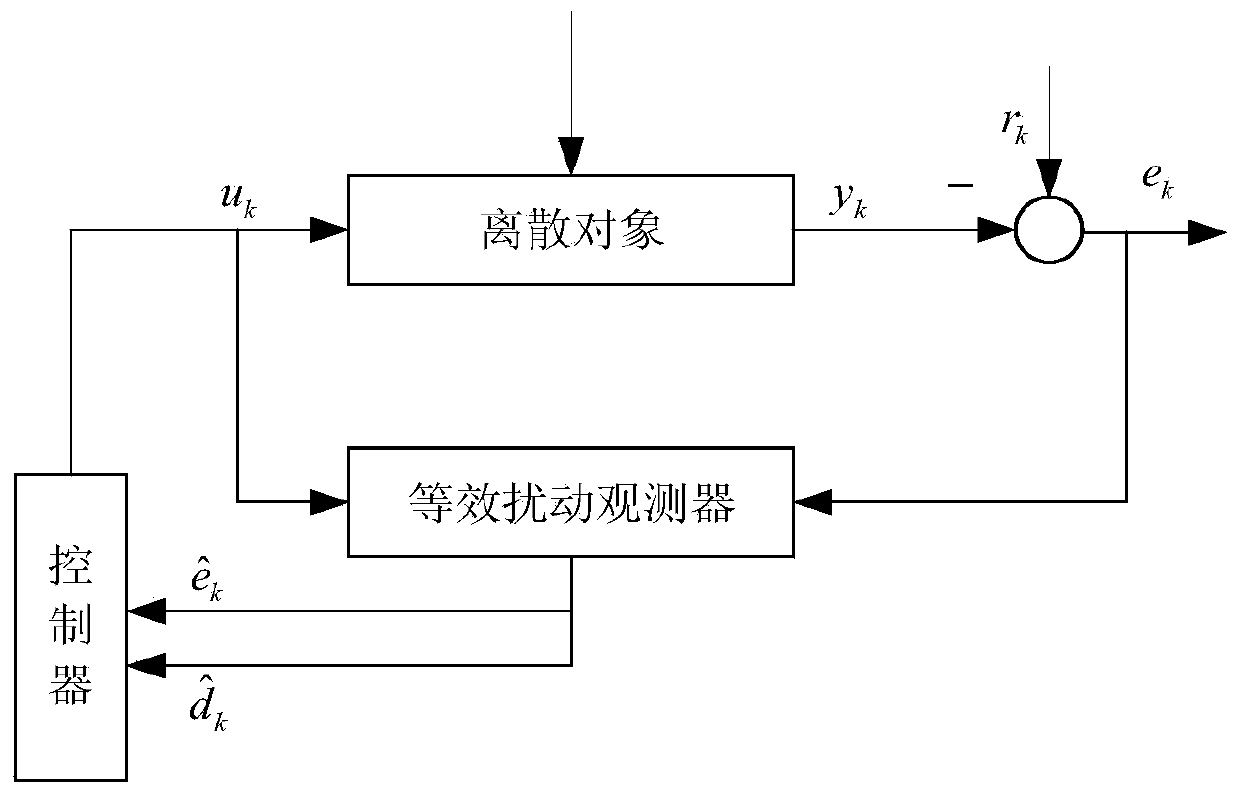
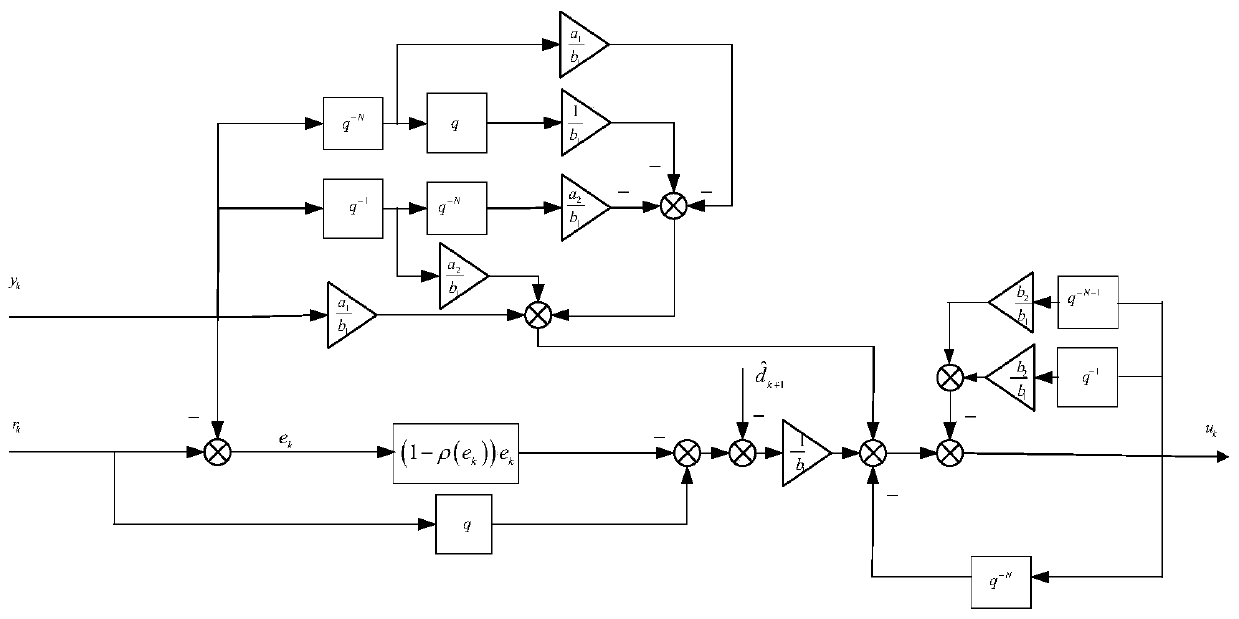
[0119] refer to Figure 1-Figure 37 , a servo system non-switching attraction repetitive control method using equivalent disturbance compensation, the controlled object is a periodic servo system, where, figure 1 is the block diagram of AC permanent magnet synchronous motor servo system; figure 2 Equivalent disturbance observer block diagram; image 3 is the block diagram of the Switchless Attract Duplicate Controller.
[0120] A servo system non-switching attraction repetitive control method using equivalent disturbance compensation, comprising the following steps:
[0121] Step 1. Given a periodic reference signal, satisfy (1);
[0122] Step 2. Define the tracking error, the second-order difference model of the motor servo system is (2), and the tracking error of the system is (3);
[0123] Step 3. construct the equivalent disturbanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More