

A rehabilitation exoskeleton glove robot
A robot and exoskeleton technology, applied in the direction of manipulators, gymnastics equipment, muscle training equipment, etc., can solve the problems of life ability, labor ability loss, unsuitable for use and carrying, and increase user fatigue, so as to achieve easy wear and carry , Improve the effect of control ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention provides a rehabilitation type exoskeleton glove robot. The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
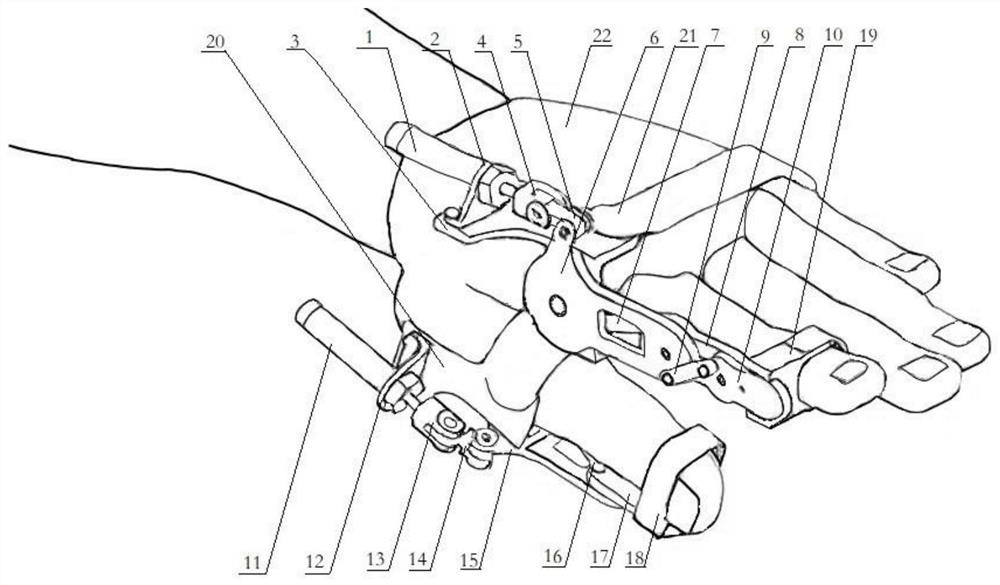
[0019] Mechanism of the present invention such as figure 1 As shown, it is mainly divided into three parts: the index finger mechanism, the thumb mechanism, and the control system.
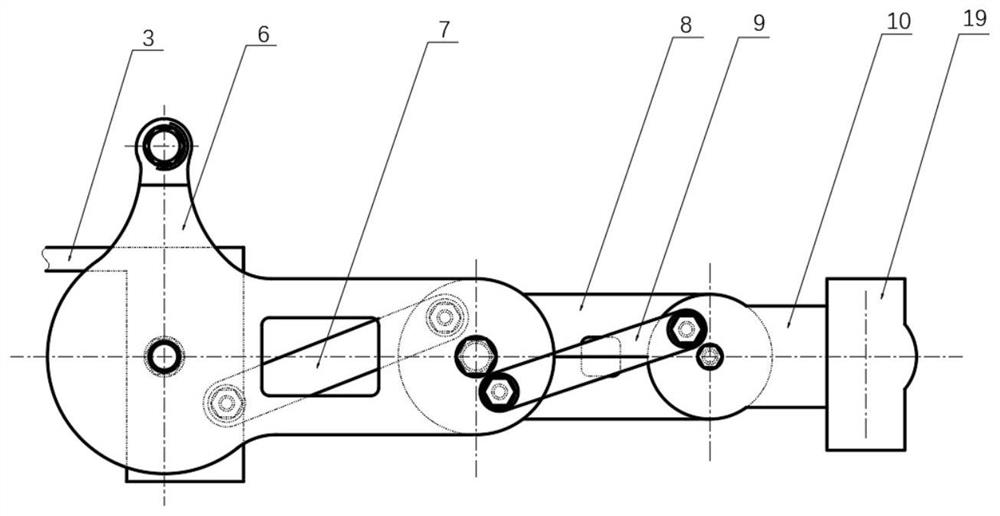
[0020] The index finger mechanism: the controller controls the cylinder core of the first pneumatic cylinder 1 to perform reciprocating linear motion, the first pneumatic cylinder 1 is fixed on the first baffle plate 2, the first baffle plate 2 is fixed on the first mechanical frame 3, and the air pressure The cylinder core of the cylinder pushes the first slider 4, the first slider 4 is hinged with the first connecting rod 5, the first connecting rod 5 is hinged with the second connecting rod 6, and the second connecting rod 6 is hinged with the first mechanical skeleton 3, The second c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More