Automatic driving control method of special-shaped road intersection, and vehicle
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
An automatic driving control and vehicle technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problems of scarce heterogeneous road information and low penetration rate of high-precision maps
Active Publication Date: 2020-02-14
CHINA FIRST AUTOMOBILE
View PDF22 Cites 4 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Unmanned driving requires high-precision maps to accurately judge and compare road conditions, but the penetration rate of high-precision maps is still very low, and the complex heterogeneous road information is even rarer
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0035] This embodiment discloses an automatic driving control method at a special-shaped intersection, including the following steps:
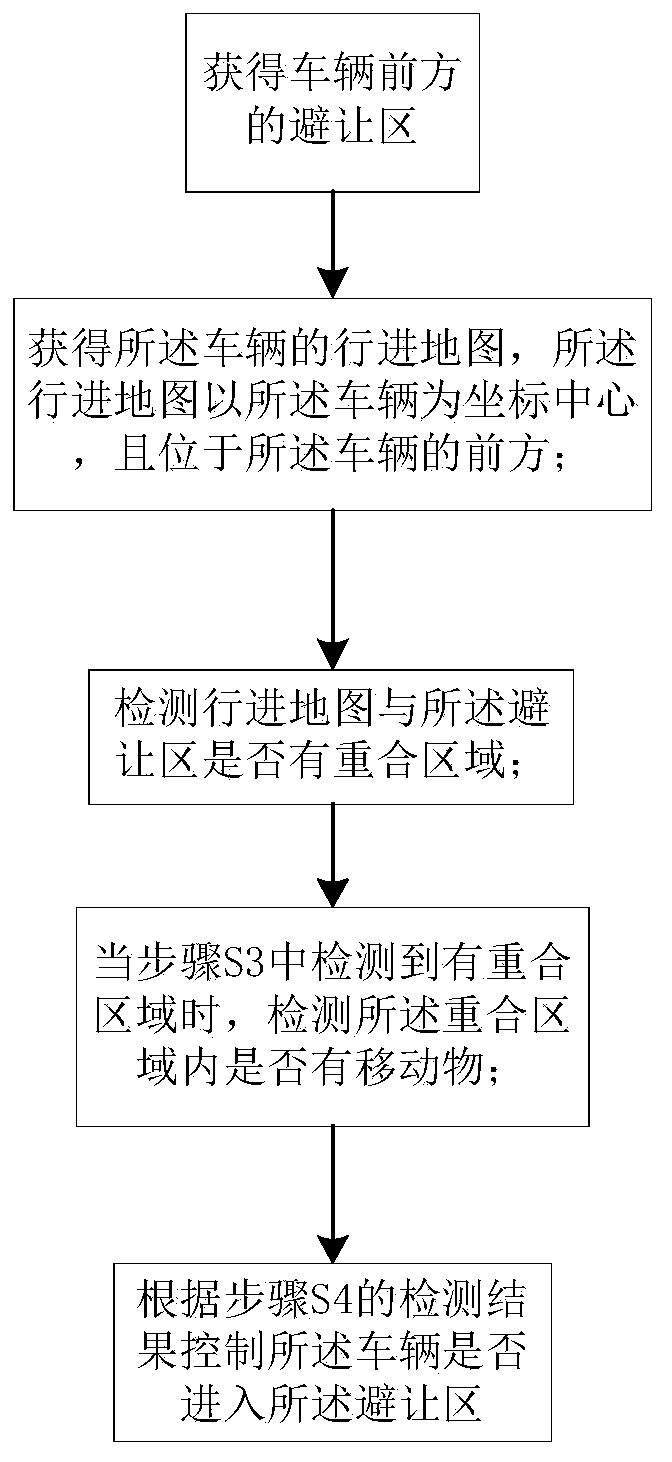
[0036] S1. Obtain the avoidance zone in front of the vehicle;
[0037] S2. Obtain the travel map of the vehicle, the travel map takes the vehicle as the coordinate center and is located in front of the vehicle;
[0038] S3. Detect whether there is an overlapping area between the traveling map and the avoidance area;
[0039] S4. When an overlapping area is detected in step S3, detect whether there is a moving object in the overlapping area;
[0040] S5. Control whether the vehicle enters the avoidance area according to the detection result of step S4.
[0041] Obtain the avoidance area and travel map in front of the vehicle, and detect whether there is an overlapping area between the two. When there is an overlapping area between the two, detect whether there is a moving object in the overlapping area, and then control the movement of the ve...
Embodiment 2
[0043] Such as figure 2 and image 3 As shown, the present embodiment discloses an automatic driving control method at a special-shaped intersection, including the following steps:
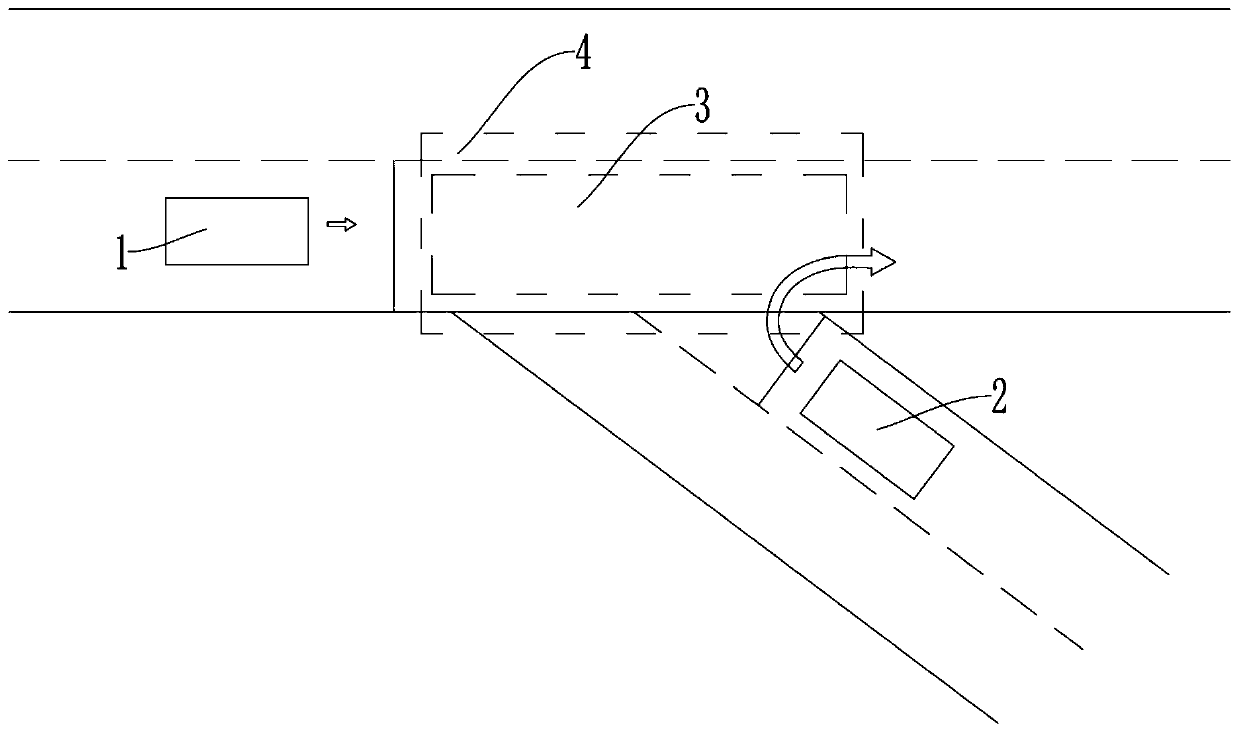
[0044] S1. Obtain the avoidance area 3 in front of the vehicle 2, and obtain the stop line in front of the vehicle 2 at the same time;
[0045] S2. Obtain the travel map 4 of the vehicle 2. The travel map 4 takes the vehicle 2 as the coordinate center and is located in front of the vehicle 2; wherein the travel map 4 and the avoidance area 3 have the same shape and are both rectangular; and the travel map 4 is slightly larger than The area of the avoidance zone 3.
[0046] S3. Detect whether there is an overlapping area between the traveling map 4 and the avoidance area 3;
[0047] S4. When an overlapping area is detected in step S3, detect whether there is a moving object 1 in the overlapping area; the moving object 1 mainly refers to pedestrians, animals, other vehicles 2, bicycles or elec...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to the technical field of automatic driving, and particularly relates to an automatic driving control method of a special-shaped road intersection, and a vehicle. The automatic driving control method of the special-shaped road intersection comprises the following steps: S1, acquiring an avoidance region in front of the vehicle; S2, acquiring a marching map of the vehicle, wherein the vehicle is taken as a coordinate center of the marching map, and the marching map is located in front of the vehicle; S3, detecting whether the marching map is overlapped with the avoidance region; S4, when an overlapped region is detected in the step S3, detecting whether a moving object is in the overlapped region; S5, according to the detection result of the step S4, controlling the vehicle to enter into the avoidance region or not. The avoidance region and the marking map in front of the vehicle are acquired, and whether the avoidance region and the marching map are overlapped isdetected, when the overlapped region is formed by the avoidance region and the marching map, whether the moving object exists in the overlapped region is detected, and then, operation of the vehicle is controlled according to whether the moving object exists in the overlapped region, thus, situations of the special-shaped road intersection and vehicles arising can be accurately and quickly judged,safe driving can be realized.
Description
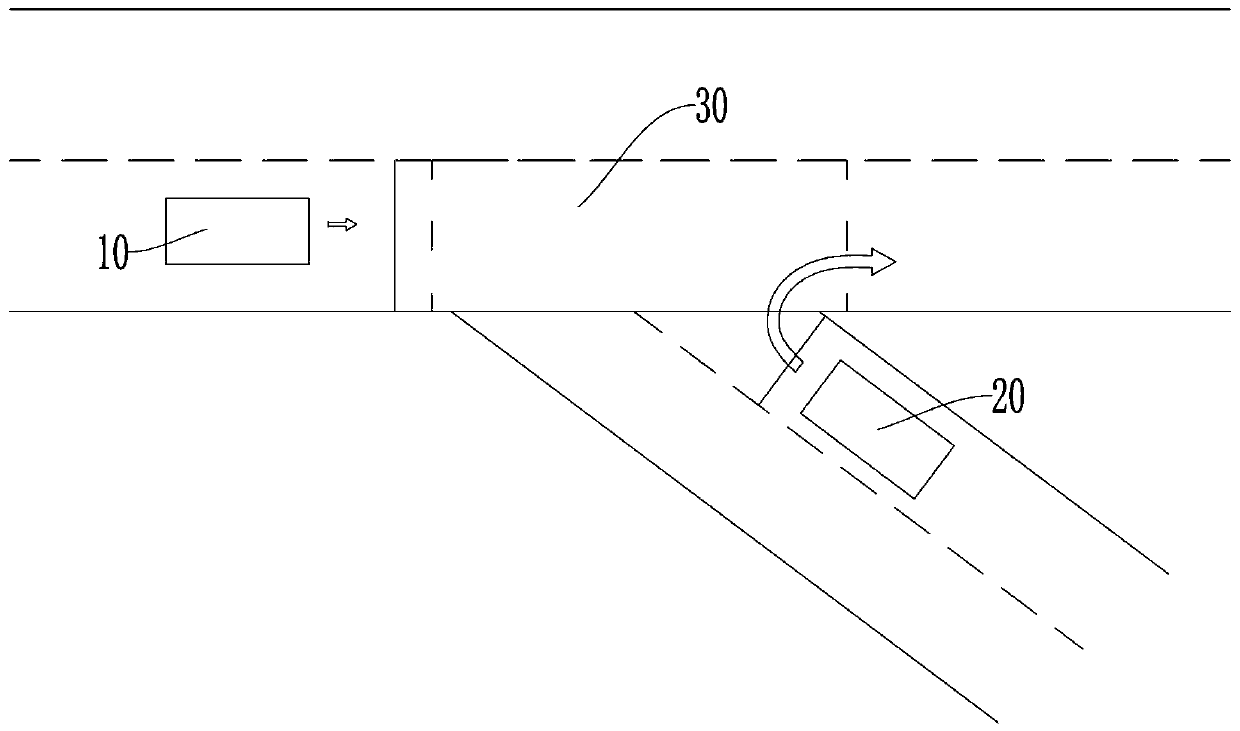
technical field [0001] The invention relates to the technical field of automatic driving, in particular to an automatic driving method and a vehicle at a special-shaped intersection. Background technique [0002] With the advent of 5G technology, unmanned autonomous driving is gradually becoming possible. Unmanned driving requires high-precision maps to accurately judge and compare road conditions, but the penetration rate of high-precision maps is still very low, and the complex heterogeneous road information is even rarer. but if figure 1 As shown, the unmanned vehicle 20 needs to make accurate and fast judgments on the situation of the irregular intersection and the vehicles appearing at the irregular intersection, so as to avoid the occurrence of safety accidents and ensure safe driving. When the unmanned vehicle 20 is driving to a special-shaped intersection, the opponent's first vehicle 10 is driving. According to the traffic regulation "turn and go straight", if the...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More