

A Robust and Fast UAV Photogrammetry Mark Detection and Localization Method
A photogrammetry and mark detection technology, applied in image analysis, image enhancement, instruments, etc., can solve the problems of low mark positioning accuracy, low computational efficiency, and high computational complexity, achieve the advantages of detection effectiveness and reliability, overcome the The effect of blurred image and high calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
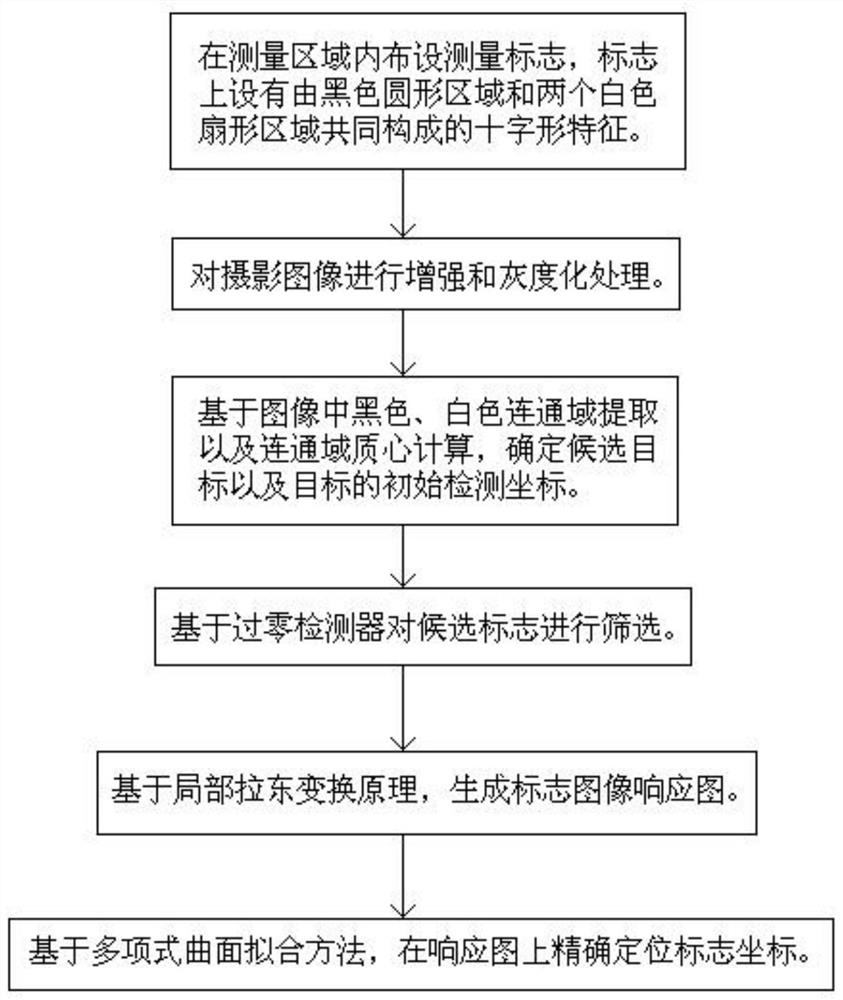
[0054] see figure 1 , a robust and fast UAV photogrammetry mark detection and positioning method, including the following steps:
[0055] Step 1. Set up signs in the measurement area;
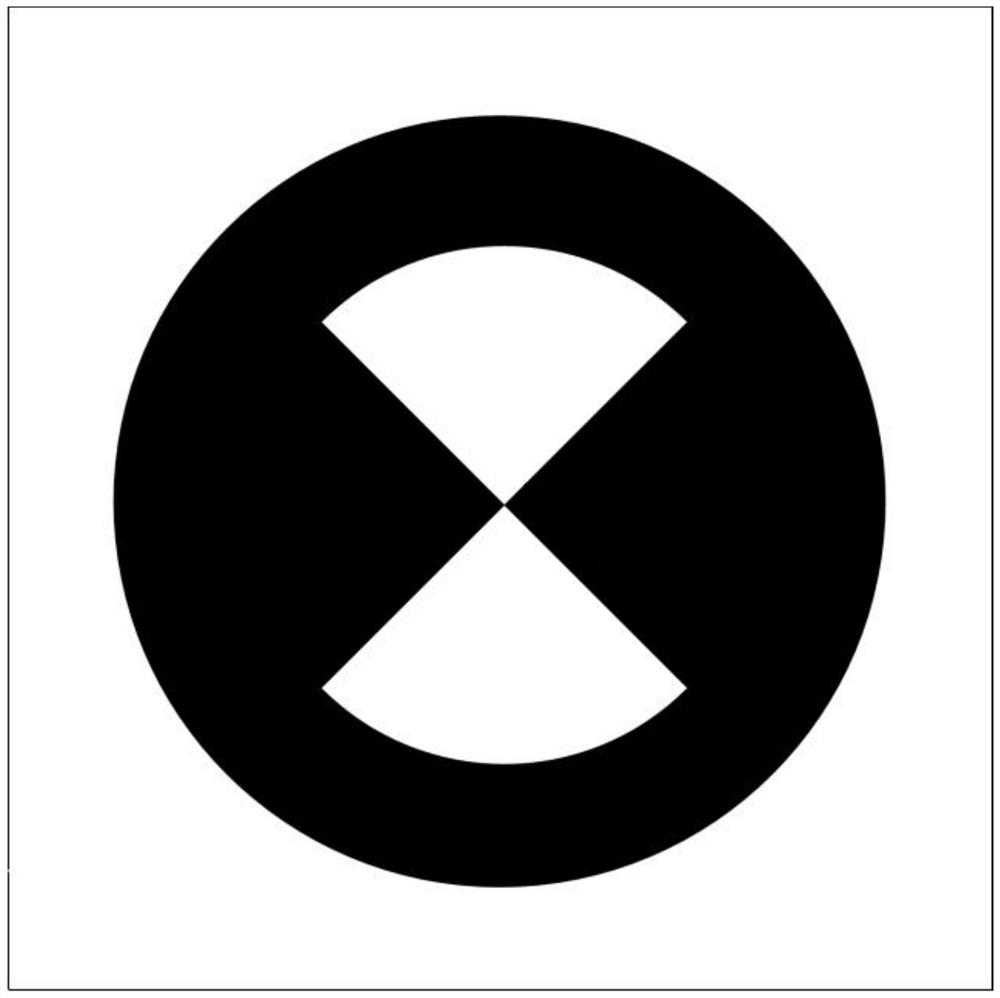
[0056] see figure 2 , the background of the measurement mark is white and includes a black circular area and two 90° white fan-shaped areas of the same size set in the black circular area. The centers of the three areas coincide and the two white fan-shaped areas are set at ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More