

Unmanned aerial vehicle navigation map construction system and method based on image three-dimensional reconstruction technology
A navigation map and three-dimensional reconstruction technology, applied in the field of three-dimensional reconstruction, can solve problems such as difficulty in obtaining three-dimensional spatial maps, and achieve the effects of fast reconstruction speed, reduced time consumption, and high map accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
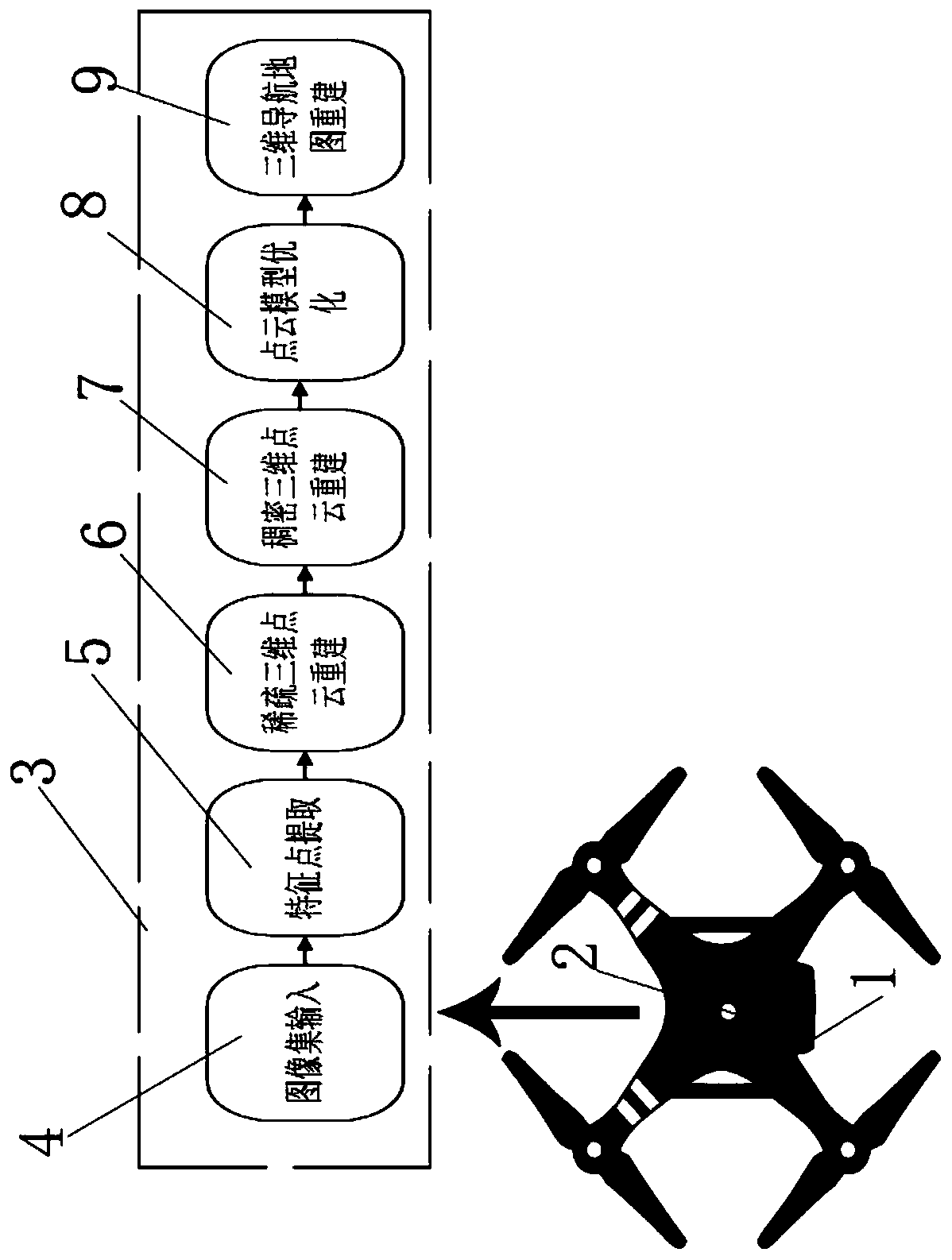
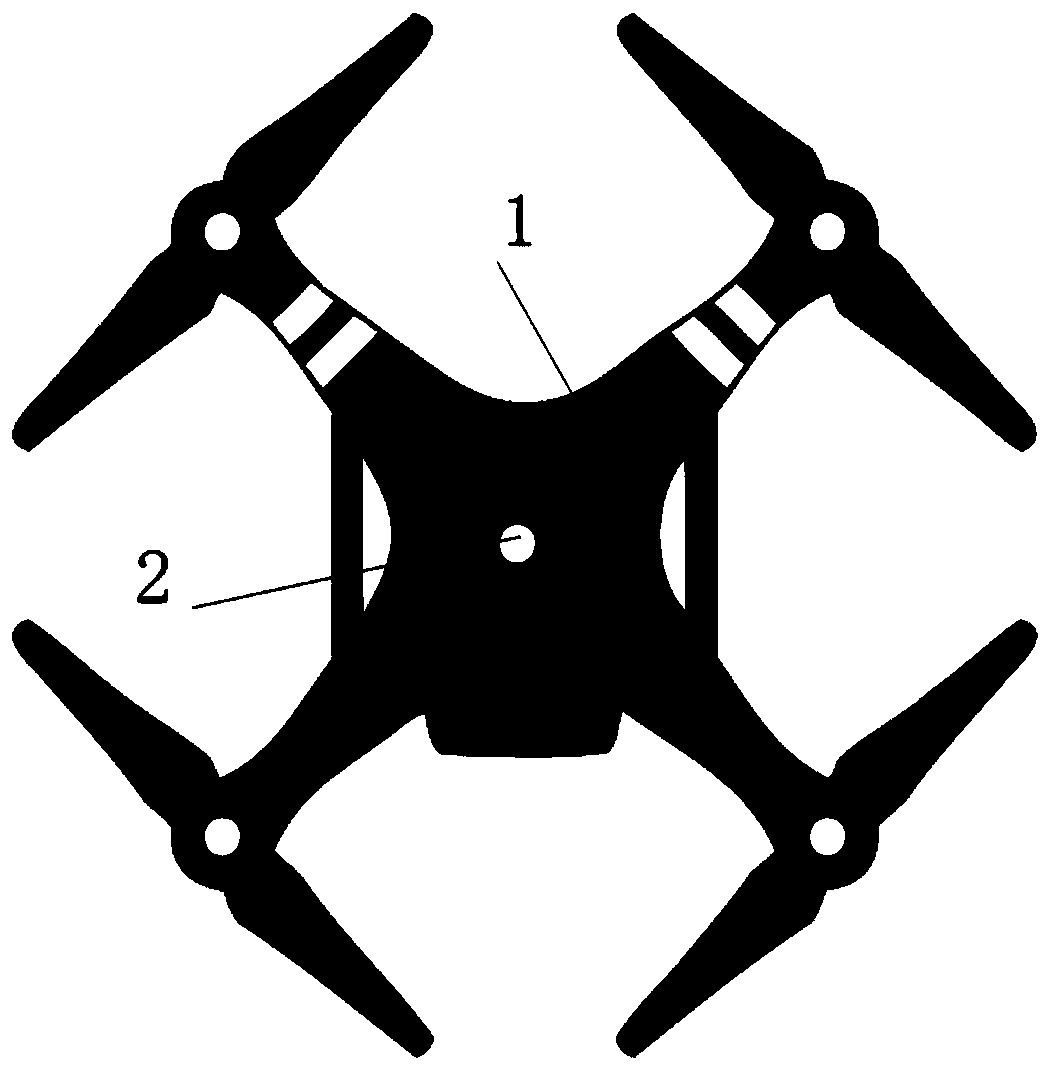
[0057] see figure 1 , figure 2 , this embodiment discloses a UAV navigation map construction system based on image three-dimensional reconstruction technology, including a UAV 1, a data collection component 2 and a three-dimensional navigation map construction system 3; the data collection component 2 is set in an unmanned On the machine 1, the data acquisition component 2 is a camera; the camera is used to collect the image set of the scene; the three-dimensional navigation map construction system 3 includes an image set input system 4, a feature point extraction system 5, and a sparse three-dimensional point cloud reconstruction system 6. A dense three-dimensional point cloud reconstruction system 7, a point cloud model optimization system 8 and a three-dimensional navigation map reconstruction system 9; the image set input system 4 is to input the scene image set into the three-dimensional navigation map construction system, and the features The point extraction system 5...
Embodiment 2
[0067] Such as Figure 3-7 As shown, this embodiment discloses a method for constructing a UAV navigation map based on image three-dimensional reconstruction technology, which specifically includes the following steps:
[0068] S1, for constructing a three-dimensional navigation map for the scene image set collected by the data collection component 2;
[0069] S2. Input the collected scene image set into the 3D navigation map construction system, and sequentially perform feature point extraction, sparse 3D point cloud reconstruction, dense 3D point cloud reconstruction, point cloud model optimization and 3D point cloud reconstruction in the 3D navigation map construction system. After the navigation map is reconstructed, the three-dimensional navigation map of the scene is finally obtained as the navigation assistance information for the UAV 1 .
[0070] As a preference, the specific method for constructing a three-dimensional navigation map for the scene image set collected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More