

Unmanned aerial vehicle induction method and system based on position spoofing
A UAV, current location technology, applied in the field of satellite navigation, can solve the problems of UAV navigation deception, inability to achieve, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
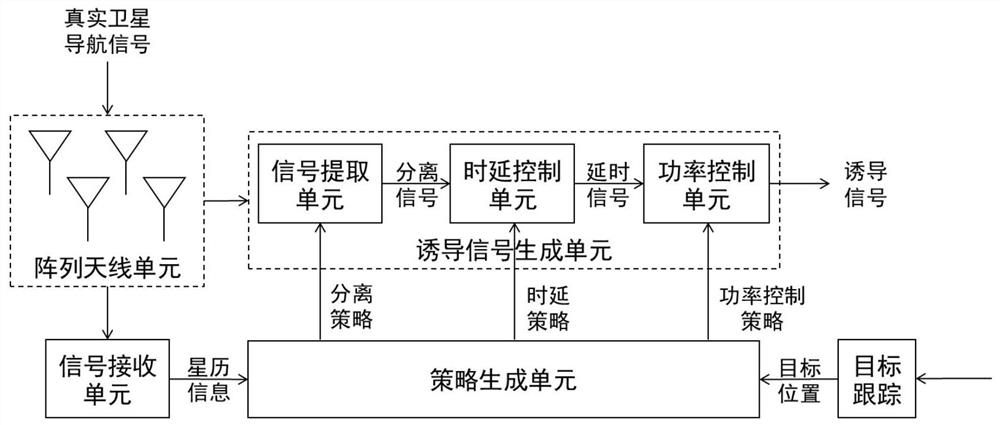
[0072] A specific embodiment of the present invention discloses a UAV induction system based on location deception, the structural diagram is as follows figure 1 As shown, the system includes: a satellite navigation signal real-time receiving unit, a target tracking unit, a strategy generating unit, and an induced signal generating unit; wherein,
[0073] The satellite navigation signal real-time receiving unit is used to receive and analyze the real satellite navigation signals of all visible satellites, and obtain the ephemeris information of all visible satellites; for example, in this process, a high-performance satellite navigation receiver can be used to receive all satellite navigation signals in real time The real navigation signal of the satellite can be seen, and the capture, tracking, ephemeris reception, positioning calculation and navigation information storage / output of the real satellite navigation signal can be completed. Exemplarily, the real-time receiving un...
Embodiment 2
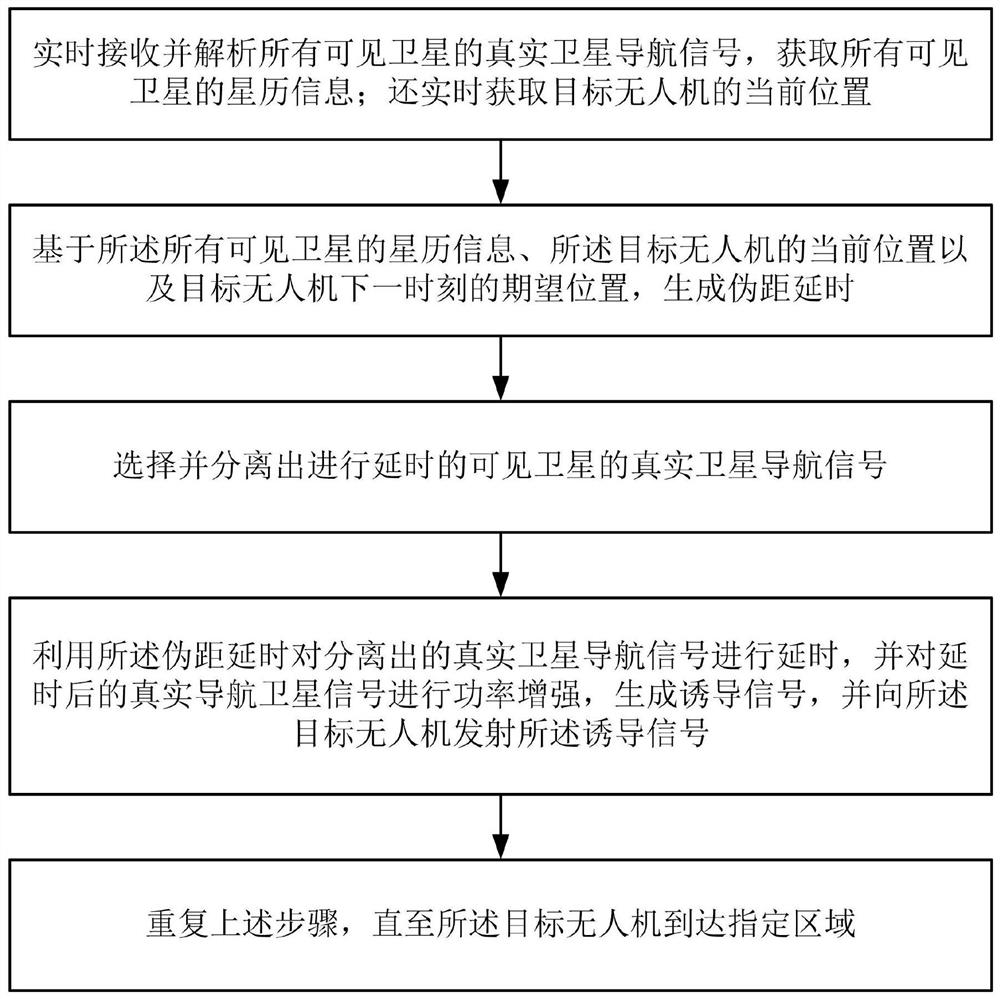
[0122] In Embodiment 2 of the present invention, a method for inducing drones based on location deception is also provided, the flow chart is as follows figure 2 As shown, the method includes the following steps:
[0123] Step S1: Receive and analyze the real satellite navigation signals of all visible satellites in real time, obtain the ephemeris information of all visible satellites; also obtain the current position of the target UAV in real time;
[0124] Step S2: Generate a pseudo-range delay based on the ephemeris information of all visible satellites, the current position of the target drone, and the expected position of the target drone at the next moment;
[0125] Step S3: selecting and separating real satellite navigation signals of visible satellites for delay;
[0126] Step S4: Use the pseudo-range delay to delay the separated real satellite navigation signal, and perform power enhancement on the delayed real navigation satellite signal to generate an induced sign...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More