

Parallel robot capable of being dragged in small range for teaching
A technology of dragging and teaching, robot, applied in the direction of manipulator, program-controlled manipulator, manufacturing tools, etc., can solve the problems of inconvenient actual teaching, low degree of freedom, etc., to achieve convenient and fast work and teaching, and improve the local degree of freedom Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
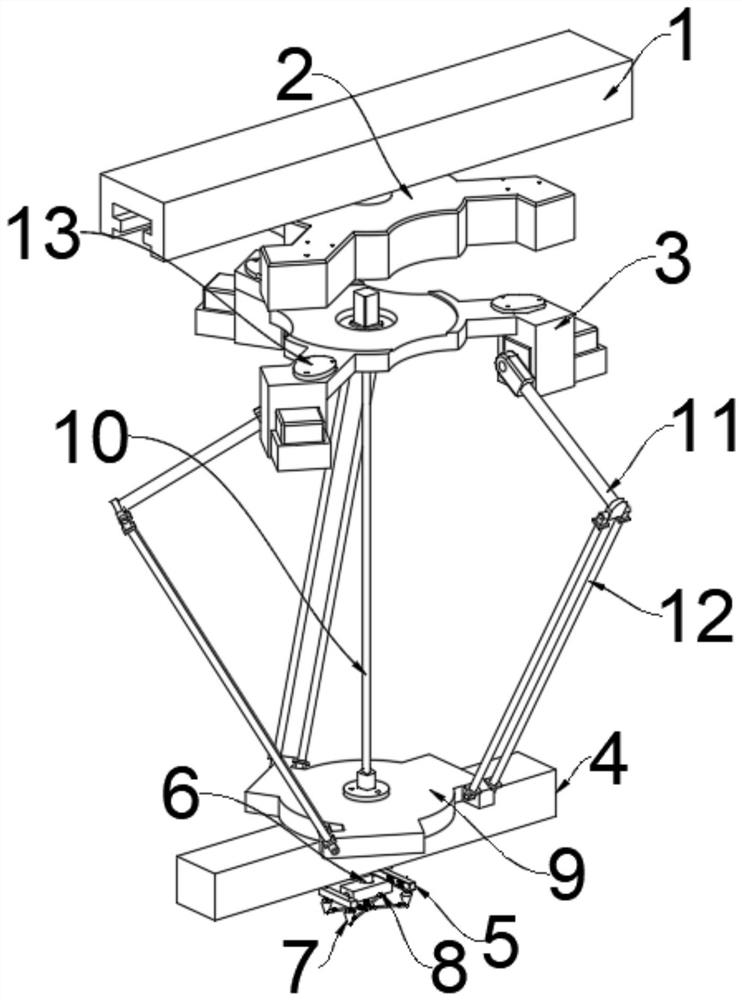
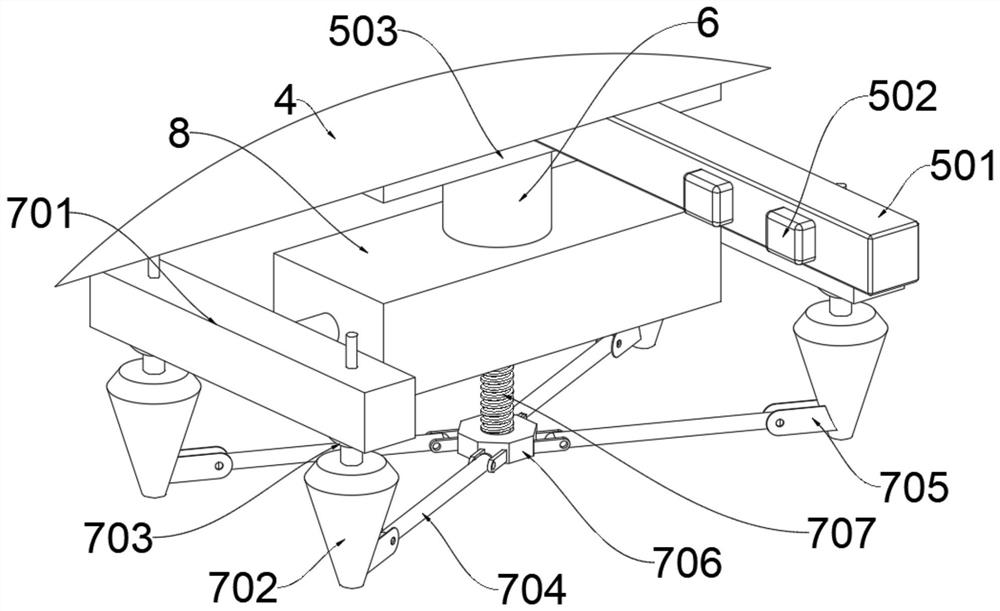
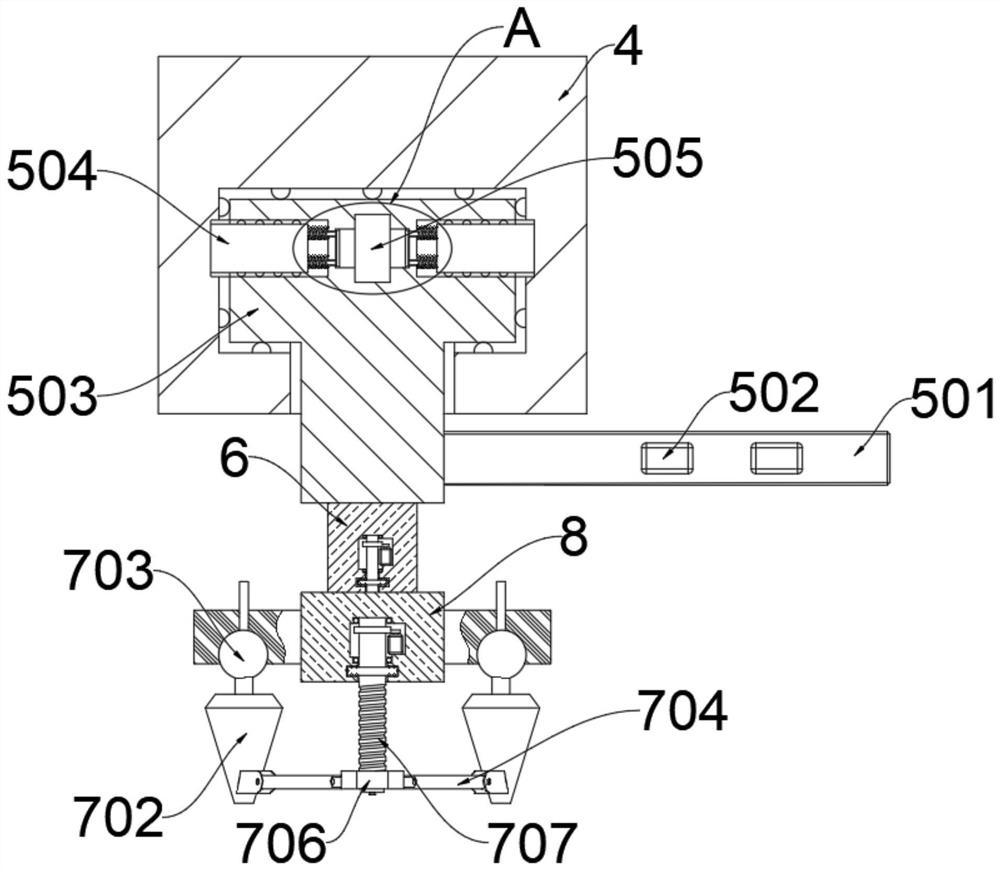
[0028] see Figure 1 to Figure 6 , an embodiment provided by the present invention: a parallel robot that can be dragged and taught in a small range, including a guide rail 1, the bottom surface of the guide rail 1 is provided with a movable top cover 2 of the robot, and the movable top cover 2 of the robot A robot connection housing 3 is arranged below, and a power rod 11 is arranged on the inner side of the end of the robot connection housing 3. Adjusting connecting rods 12 are movably installed on both sides of the bottom end of the power rod 11. The middle position of the bottom surface of the robot connection housing 3 Telescopic guide rod 10 is arranged at the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More