

Intelligent finger exoskeleton mechanism and intelligent finger rehabilitation exoskeleton robot
An exoskeleton robot and exoskeleton technology, applied in gymnastics equipment, passive exercise equipment, physical therapy, etc., can solve the problems of lack of training feedback, inconvenient wearing, complex structure, etc., to achieve simple and reliable structure, good initiative, and improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
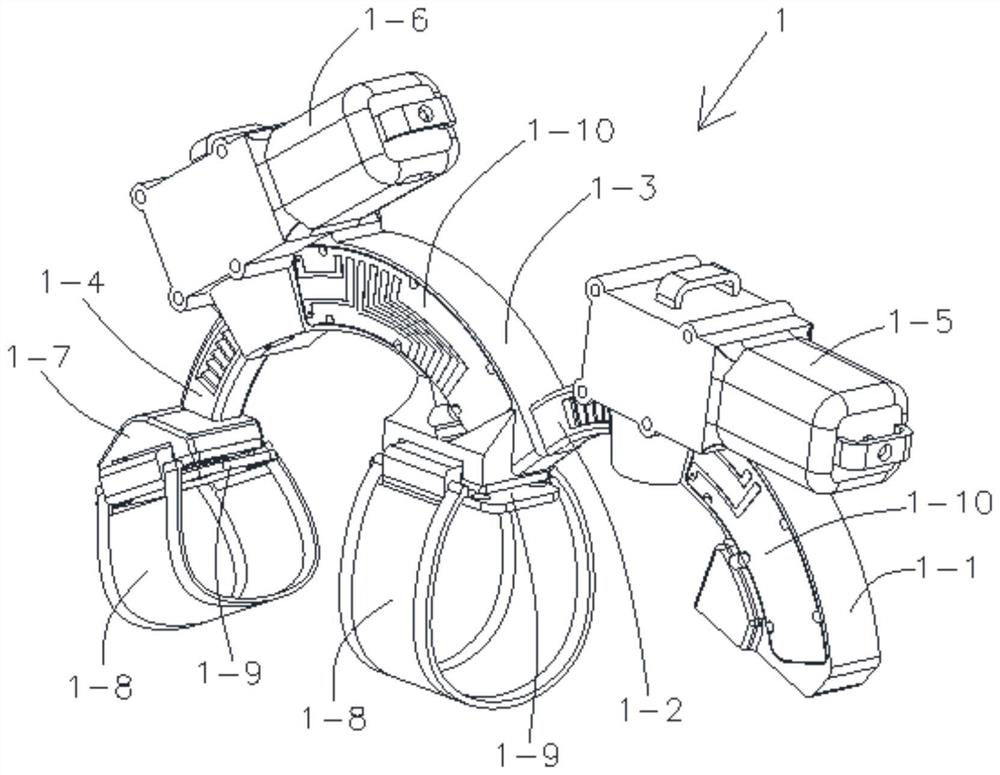
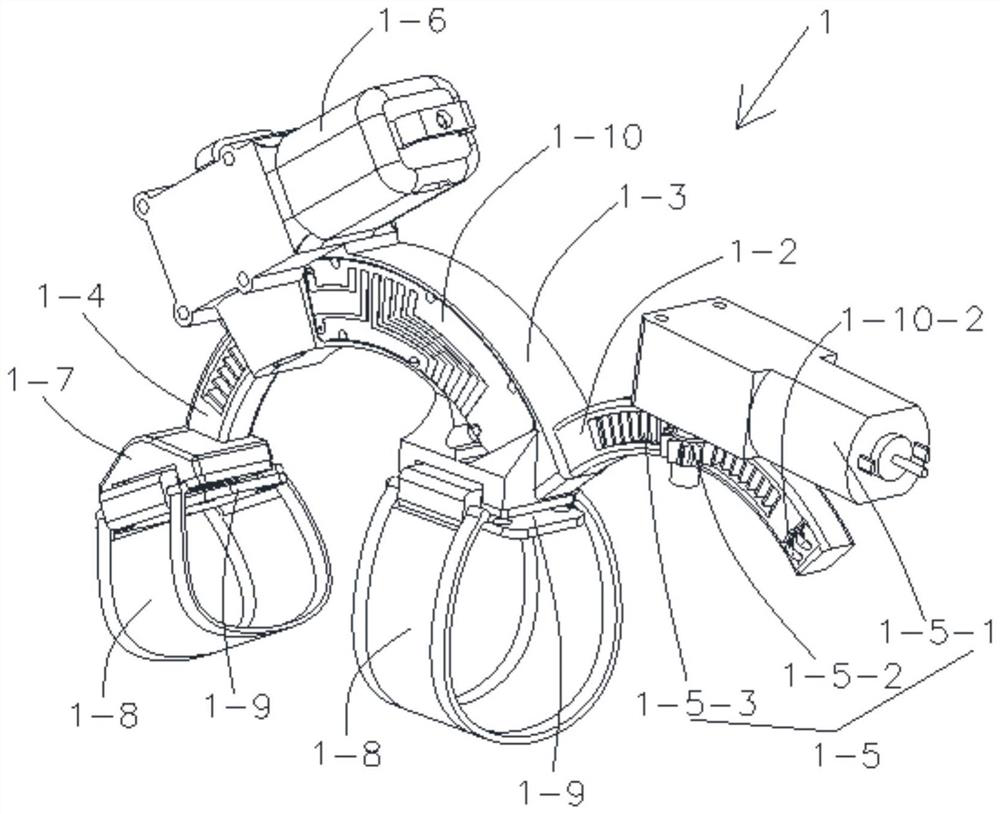
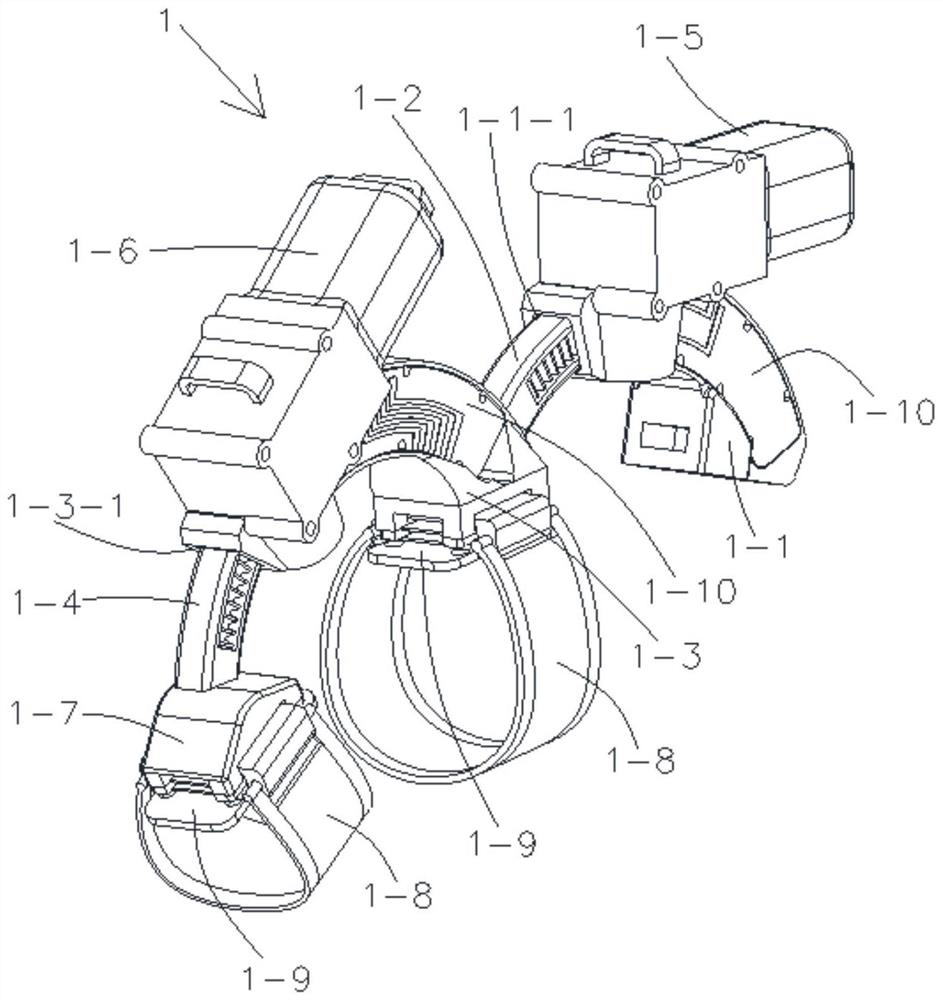
[0032] like Figure 1~5As shown, a smart finger exoskeleton mechanism 1, in this embodiment, for the convenience of description, point to the far end from the arm to the finger, with the back of the hand facing up and the palm facing down; the smart finger exoskeleton mechanism 1 includes Connected MCP joint base 1-1, MCP arc arm 1-2, PIP joint base 1-3 and PIP arc arm 1-4, such as Figure 1~3 As shown, the MCP joint base 1-1 is provided with a first arc-shaped chute 1-1-1, and the proximal end of the MCP arc-shaped arm 1-2 is slidably set on the first arc-shaped chute 1-1 -1, and the MCP arc-shaped arm 1-2 is driven to slide by the first driver 1-5, the distal end of the MCP arc-shaped arm 1-2 is fixedly connected with the PIP joint seat 1-3, and the PIP A second arc-shaped chute 1-3-1 is opened on the joint seat 1-3, and the proximal end of the PIP arc-shaped arm 1-4 is slidably set in the second arc-shaped chute 1-3-1, and the The PIP arc-shaped arm 1-4 is driven and slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More