

The Active and Passive Realization Method of Kangjian Sports Trainer
A realization method and a technology of a trainer, which are applied in the direction of muscle training equipment, sports accessories, passive exercise equipment, etc., can solve the problems that cannot be used in passive training methods, it is difficult to achieve training effects, lack of human-computer interaction, etc., and achieve resistance The effect of sensitive size change, comfortable movement, and simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
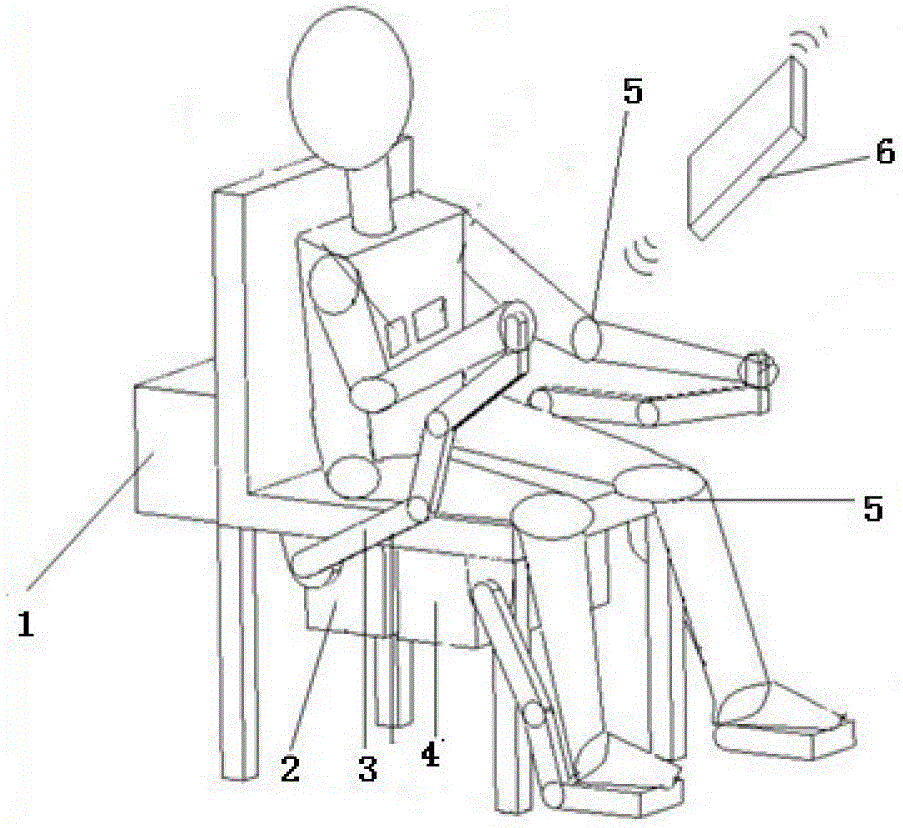
[0031] Example: see figure 1 : The structure of the health exercise trainer is mainly composed of a control unit 1, a control motor 2, a training device 3, a position sensor 4, an angle sensor 5, a touch screen 6, and the like.
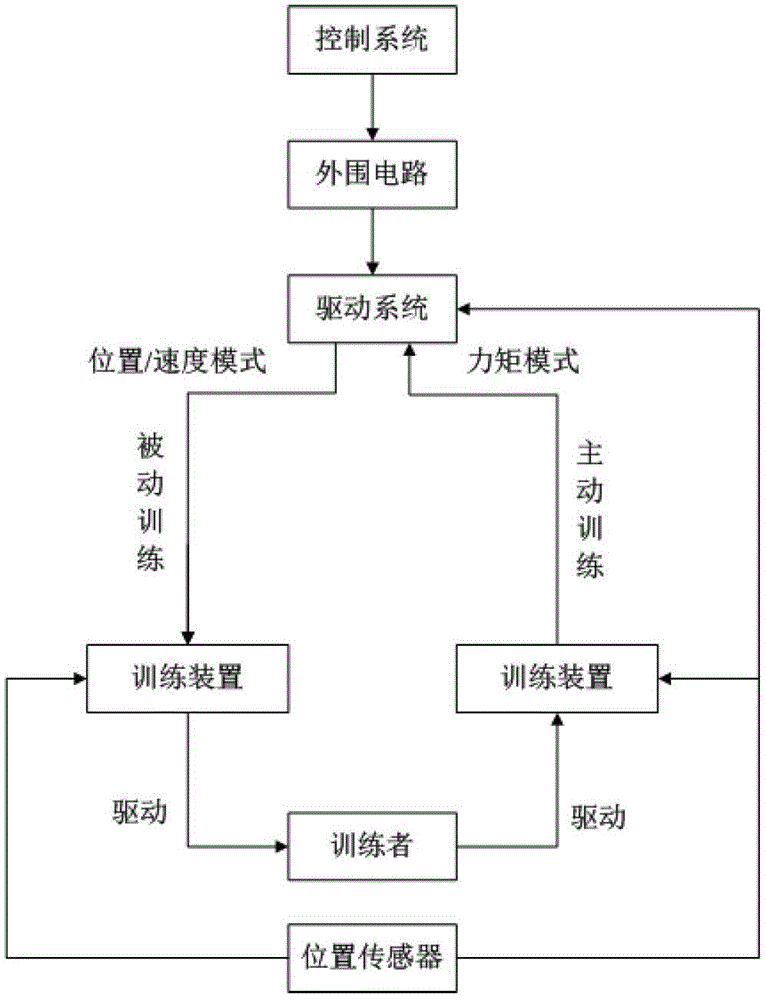
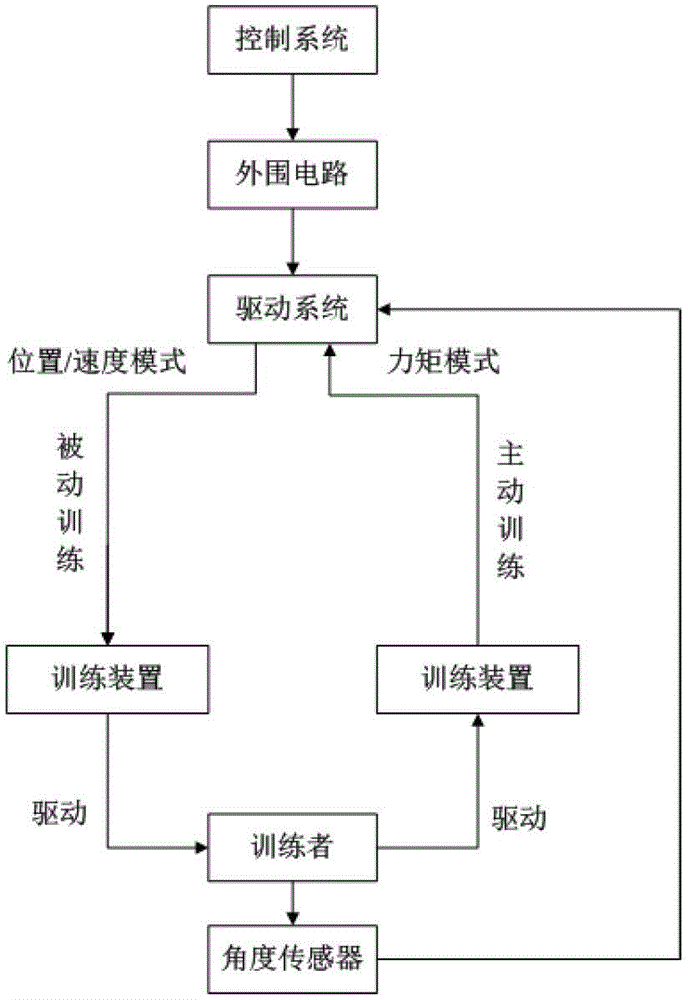
[0032] see Figure 2-3 : The active and passive implementation methods of the health exercise trainer. The trainer uses the control motor 2 to drive during passive training. The control motor can be a servo motor, a torque motor, a brushless DC motor, etc., and the control motor 2 is in position mode or speed mode. The training device 3 drives the upper and lower body movements to complete passive training, and controls the speed of the motor 2 according to the position and speed of the contact between the training device 3 and the trainer's hands or feet detected by the position sensor 4; In the mode, the speed of the motor can be simply specified according to the training speed requirement. During active training, the upper and lower limbs of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More