

Under-actuated prosthetic hand system based on planetary gear trains
A planetary gear train and drive system technology, applied in the field of medical prosthetic hand systems, can solve the problems of limited ability of electromyographic signal analysis and acquisition, and achieve the effect of reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings, so as to better understand the purpose, features and advantages of the present invention. It should be understood that the embodiments shown in the drawings are not intended to limit the scope of the present invention, but only to illustrate the essence of the technical solutions of the present invention.
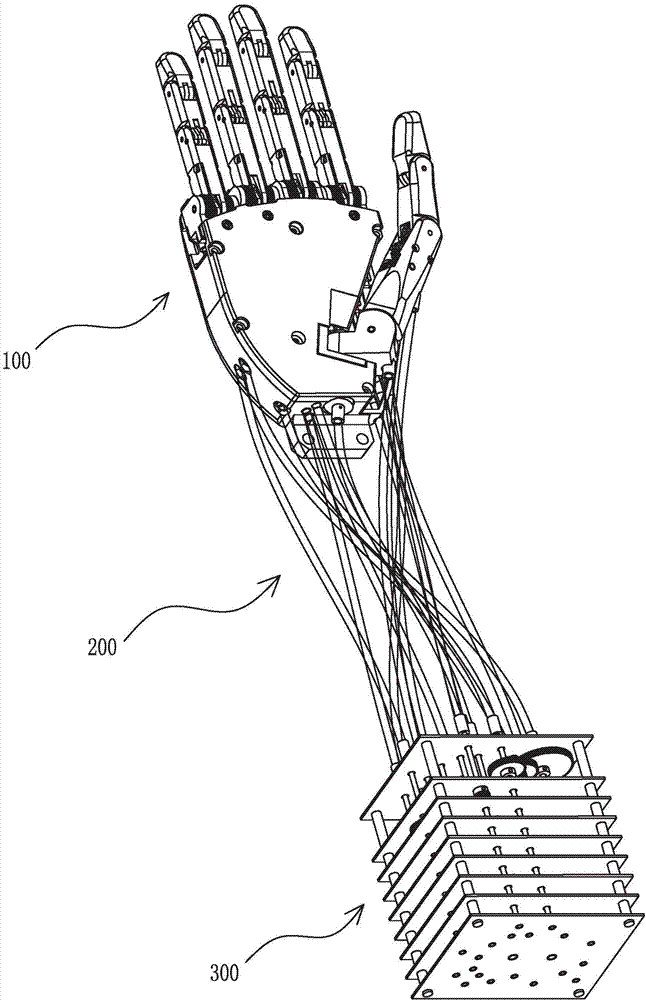
[0034] figure 1 It shows a schematic perspective view of the underactuated prosthetic hand system based on the planetary gear train of the present invention after overall assembly. Such as figure 1 As shown, the underactuated prosthetic hand system based on the planetary gear train of the present invention includes a manipulator 100, a transmission system 200 and a drive system 300, wherein the two ends of the transmission system 200 are respectively connected with the manipulator 100 and the drive system 300, and the transmission system 200 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More