

Maneuverability improving and controlling method based on distributively driven electric vehicle
A technology of electric vehicles and control methods, which is applied in the direction of electric vehicles, control drives, vehicle components, etc., and can solve problems such as the influence of vehicle yaw motion and the influence of driver's steering wheel torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
[0055] 1. Principle and framework of the control method of the present invention
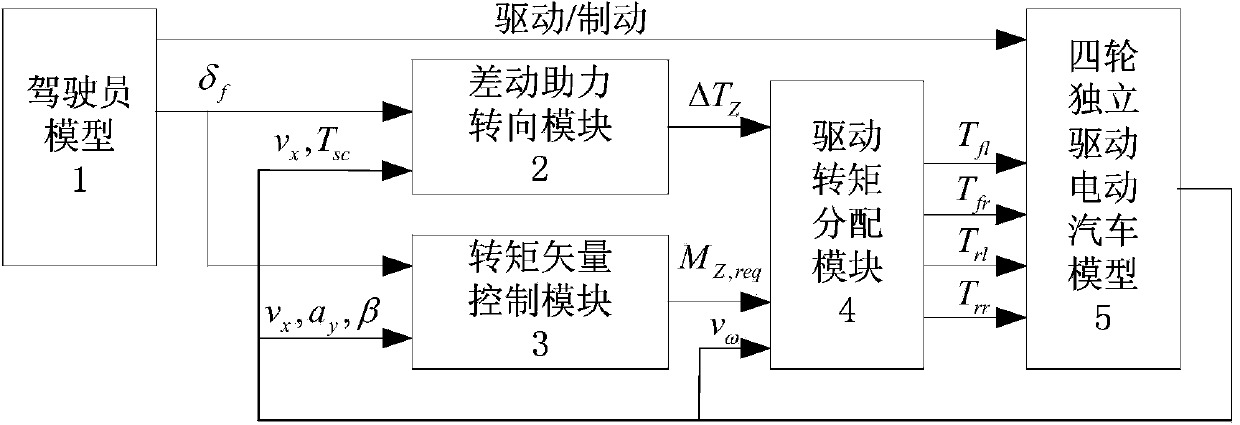
[0056] In order to achieve the two control objectives of steering assist and improving the response of yaw rate, the present invention is based on the control method for improving the maneuverability of distributed drive electric vehicles. The wheel torque differential control is used to achieve the control goal of improving the yaw rate response. The method specifically includes:
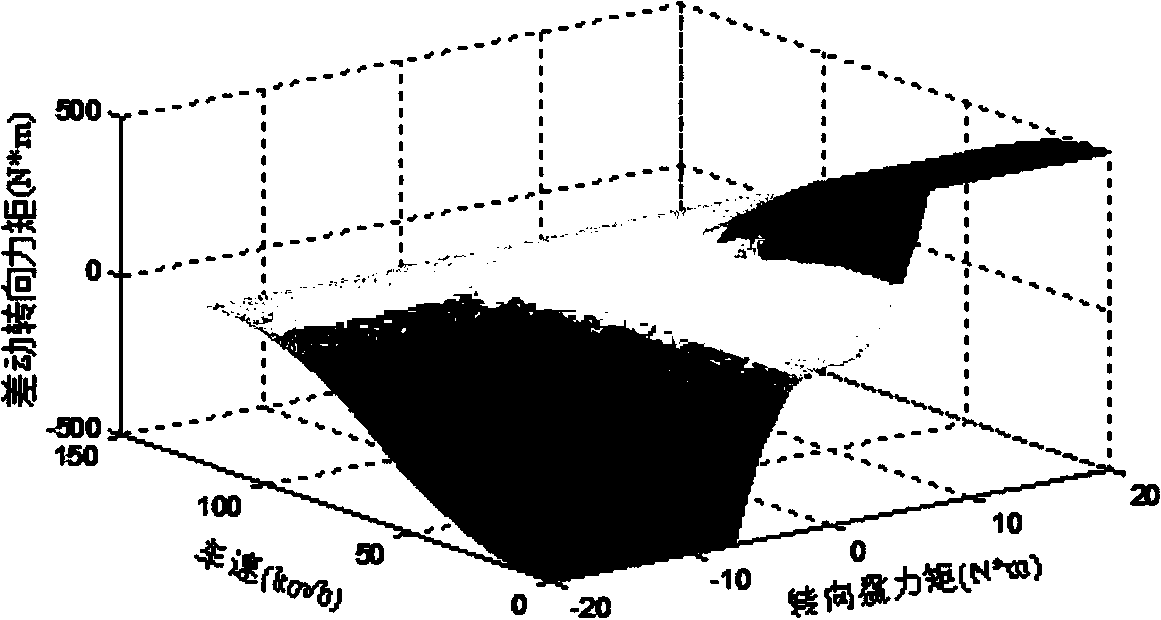
[0057] The step of obtaining the ideal differential steering assist curve is to obtain the differential steering assist ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More