

Multiple-rotor-wing unmanned aerial vehicle sensing and avoiding system and avoiding method thereof
A multi-rotor UAV and sensing module technology, applied in the field of multi-rotor UAV perception and avoidance systems, can solve the problems of large radar volume, unfavorable light and small multi-rotor UAV system integration application, high power consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
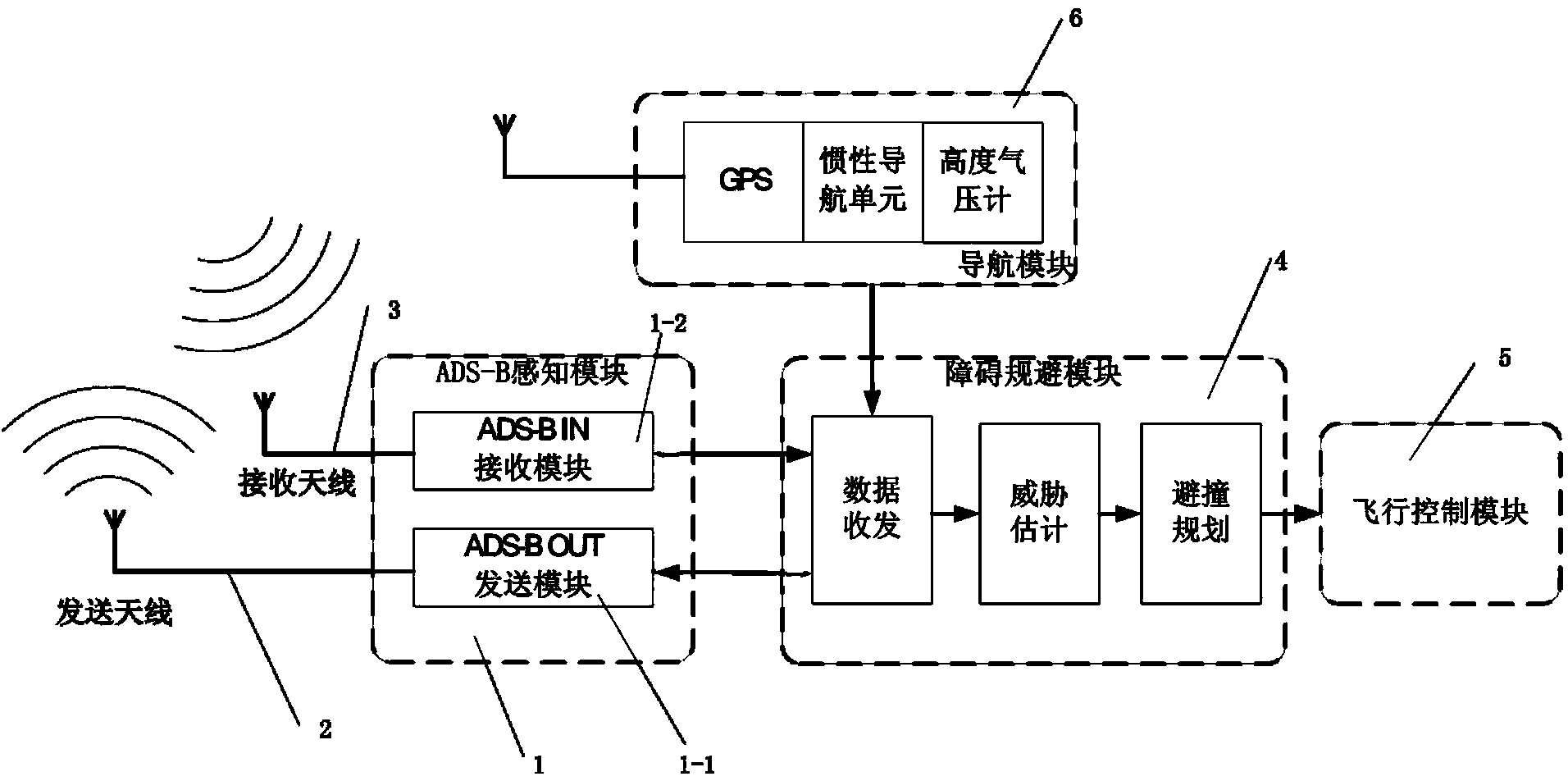
[0057] The present invention provides a multi-rotor unmanned aerial vehicle perception and avoidance system, refer to the structure figure 1 , comprising an obstacle avoidance module 4, the output of the obstacle avoidance module 4 is connected to the flight control module 5, the input end of the obstacle avoidance module 4 is also connected to the navigation module 6, and the obstacle avoidance module 4 is also connected to the ADS-B perception module 1 for data processing. Transceiver; ADS-B sensing module 1 includes ADS-B OUT sending module 1-1 and ADS-B IN receiving module 1-2, ADS-B OUT sending module 1-1 is connected with sending antenna 2, ADS-B IN receiving module 1-2 is connected with receiving antenna 3 .
[0058] Wherein, obstacle avoidance module 4 comprises data transceiver module, threat estimation module and collision avoidance plannin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More