

Measuring method of motion parameters of legged robot and its application
A technology for robot motion and parameter measurement. It is used in measurement devices, linear/angular velocity measurement, velocity/acceleration/shock measurement, etc., and can solve problems such as signal drift.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
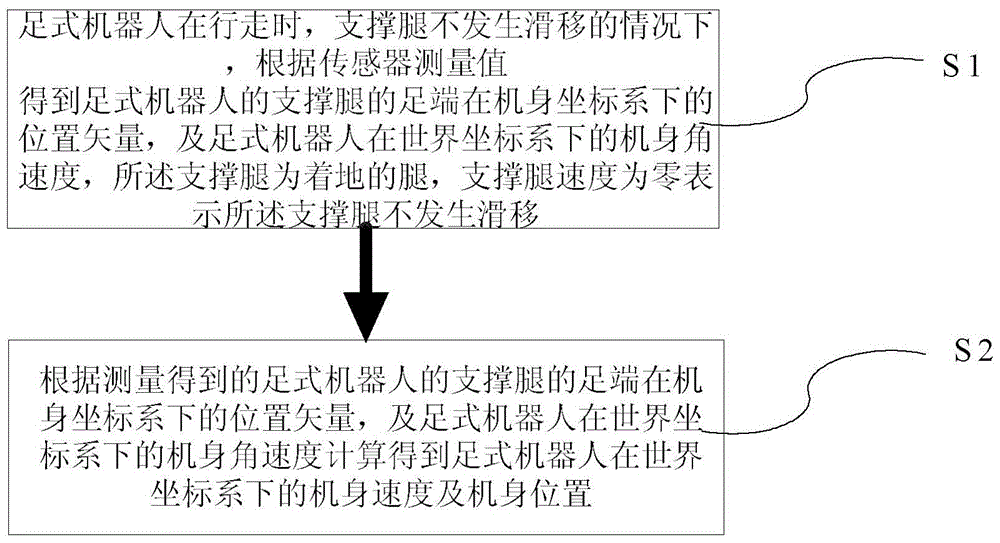
[0042] Such as figure 1 As shown, the invention provides a method for measuring motion parameters of a legged robot, comprising the following steps:
[0043] S1. When the footed robot is walking and the supporting leg does not slip, the position vector of the foot end of the supporting leg of the footed robot in the body coordinate system and the world coordinate system of the footed robot are obtained according to the sensor measurement. The angular velocity of the fuselage below, the support leg is the leg on the ground, and the speed of the support leg is zero, which means that the support leg does not slip; in this embodiment, the foot of the support leg of the legged robot is measured according to the position sen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More