

Multi-shaft mechanical arm visual control system and method based on somatosensation and touch
An intuitive control and robotic arm technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of poor control flexibility, complex control, and poor human-computer interaction characteristics, so as to simplify the process, improve the controller, improve flexibility and humanization Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Below in conjunction with each accompanying drawing, the present invention is described in detail.
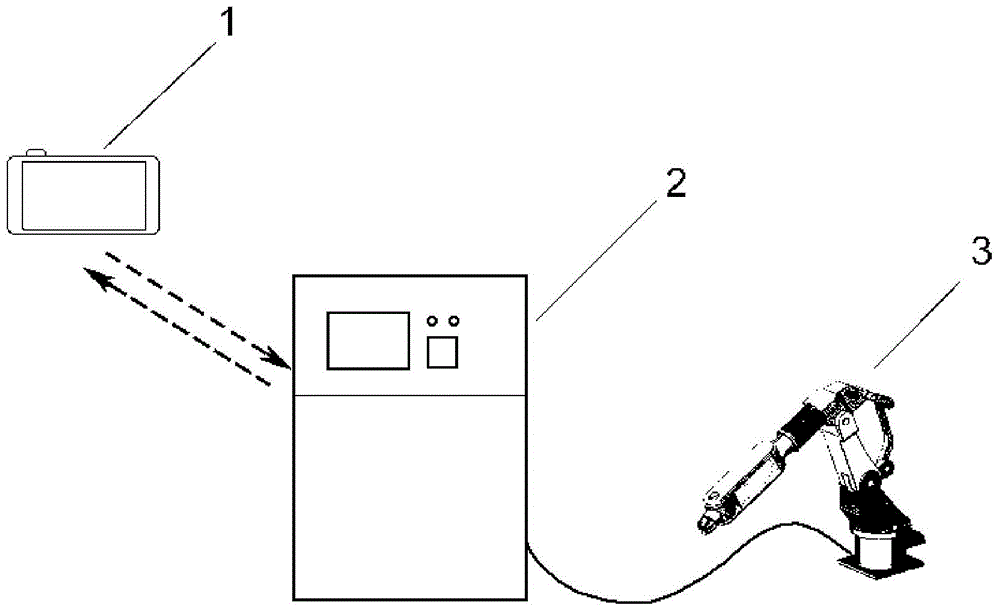
[0044] Such as figure 1 As shown, an intuitive control system for a multi-axis manipulator based on somatosensory and touch includes a hand-held control terminal 1, a controller 2 and a multi-axis manipulator 3 connected in sequence. Control terminals include:
[0045] The space position and attitude measurement module includes a gyroscope, an accelerometer and a magnetometer, which are used to collect the position signal of the handheld control terminal relative to the ground. The position signal includes the horizontal azimuth, vertical tilt angle and its own rotation angle of the handheld control terminal relative to the ground;
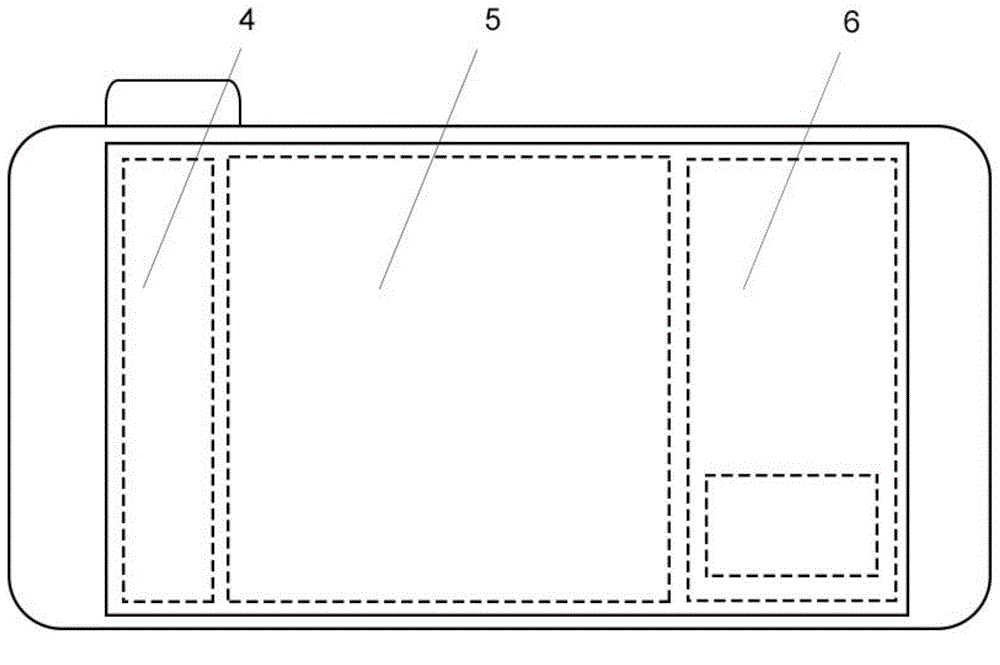
[0046] The touch screen displays the current real-time running status and setting information of the multi-axis manipulator, and collects the signal of finger sliding. The real-time running status includes program execution progress, end co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More