

Lever lateral mobile damping four-wheeler manned lunar rover folding system
A folding system and a four-wheeled vehicle technology are applied in the field of the folding system of the lever-side moving shock-absorbing four-wheeled human-lunar rover. Body slipping or sinking, ease of handling, reduced lowering effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
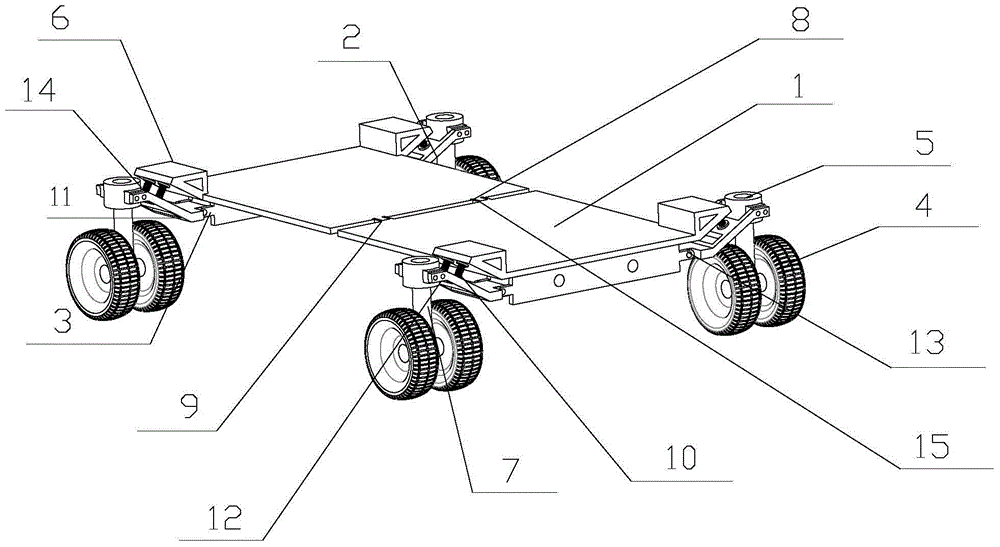
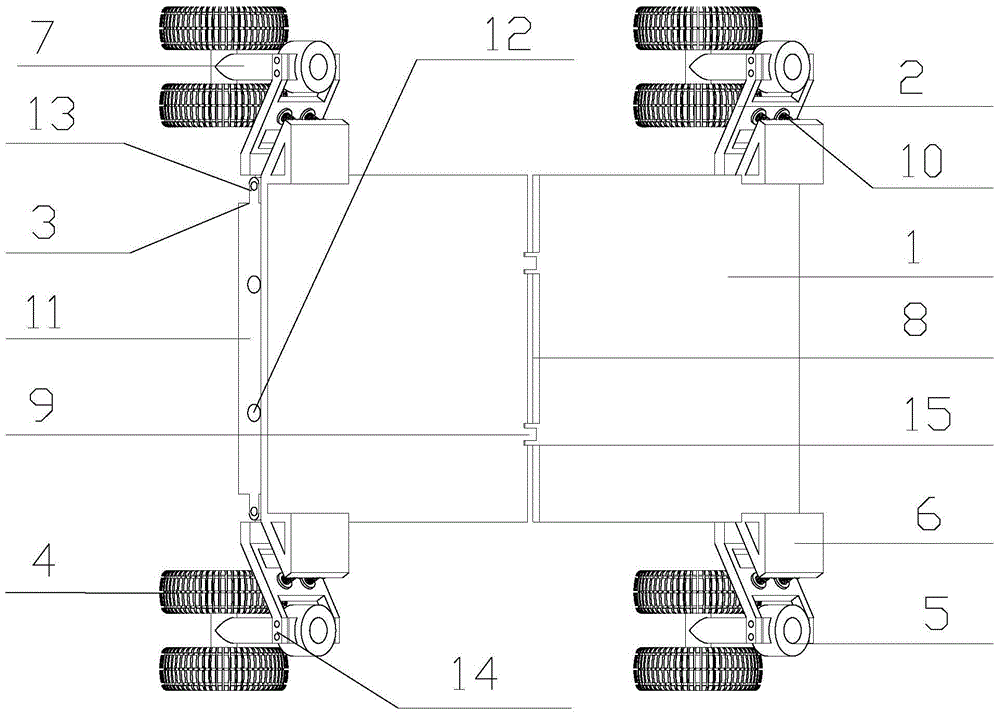
[0014] Specific implementation mode one: combine Figure 1 to Figure 6 Describe this embodiment, the system of this embodiment comprises load plate car body 1, two intermediate connection folding mechanisms 8, four double-wheel moving mechanisms and four lever-type coaxial sleeve spring mechanisms, load plate car body 1 is formed by the first The car body 1-1 and the second car body 1-2 are composed of two right-angle channel steels 6 welded on one side of the first car body 1-1, and the other side of the first car body 1-1 is connected through two intermediate The folding mechanism 8 is folded and connected to one side of the second car body 1-2, and the other side of the second car body 1-2 is welded with two right-angled channel steels 6, and the first car body 1-1 passes through a pair of rolling pins 9 and the nail groove 15 are detachably connected with the second car body 1-2, and four double-wheel moving mechanisms are evenly distributed on the lower end surface of the...
specific Embodiment approach 2
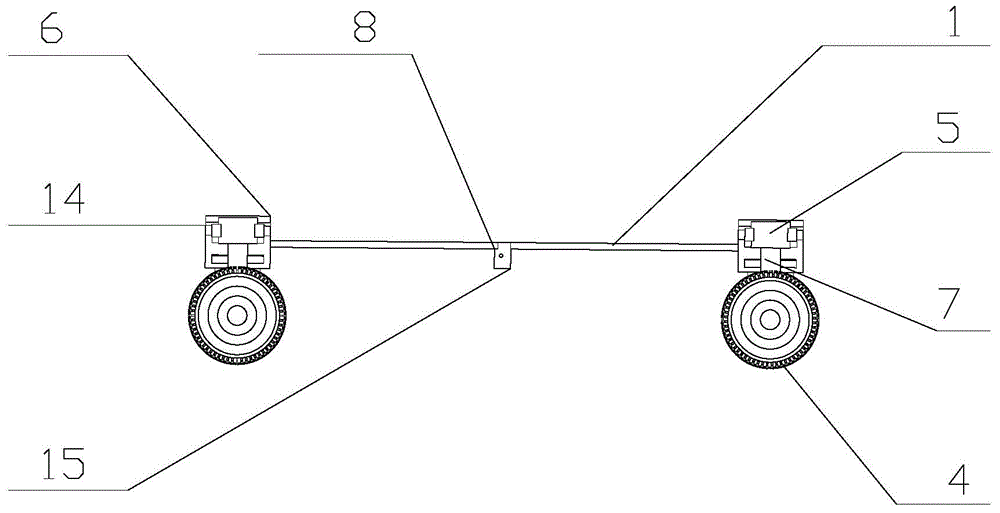
[0019] Specific implementation mode two: combination Figure 6 To illustrate this embodiment, the coaxial sleeve spring 10 of this embodiment includes a swing arm type shock absorbing flap 16, a tension and compression axial spring 17 and a bending moment axial sleeve 18, and the tension and compression axial spring 17 is sleeved on the sleeve 18. The outside and the sleeve are stretchable in the tension-compression axial spring 17, and the bottom of the tension-compression axial spring 17 and the bending moment axial sleeve 18 is provided with a swing arm type shock-absorbing flap 16, which can effectively slow down the lateral vibration. Avoid bending and twisting mode of action, while increasing the reliability of the structure. Other implementation manners are the same as the specific implementation manner 1.
specific Embodiment approach 3
[0020] Specific implementation mode three: combination figure 1 To illustrate this embodiment, each lever plate 11 of this embodiment is processed to be hollow above the corresponding wheel body 4. This structure can reduce the weight of the shock absorbing mechanism, and at the same time avoid sand and other deposits in the shock absorbing structure. Other implementation manners are the same as the specific implementation manner 1.
[0021] Working principle: the present invention adjusts the direction of avoiding obstacles through four independently driven and steered wheels, and uses the swing arm type lever side to move the axial sleeve spring damping mechanism to reduce the impact on the structure itself when starting a slope and crossing obstacles. The spring reduces the long-distance displacement generated by the tremor process to a certain proportion of short-distance displacement through the geometric deformation scaling function of the lever, and at the same time con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More