

Unmanned plane all-weather carrier landing cooperation target robustness detection and coupling method
A technology of cooperative target and matching method, applied in the field of visual navigation, can solve problems such as weak anti-environmental interference ability, difficulty in accurate extraction and matching of cooperative target feature information, and limited detection distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
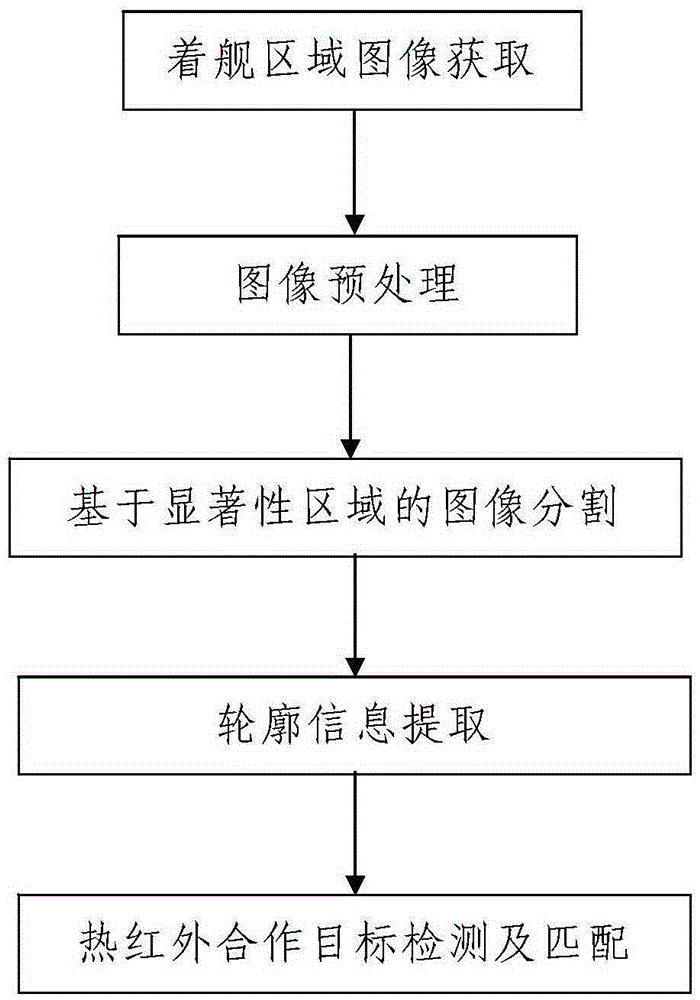
[0059] Such as figure 2 A robust detection and matching method for UAV all-weather ship landing cooperation targets shown, including the following steps:
[0060] Step 1. Acquisition of cooperation target images: use image acquisition equipment and according to the pre-designed sampling frequency to acquire images of the landing area, and synchronously transmit the acquired images to the processor for processing; the acquired images include thermal infrared ship landing cooperation an image of the target; the image acquisition device is connected to the processor;
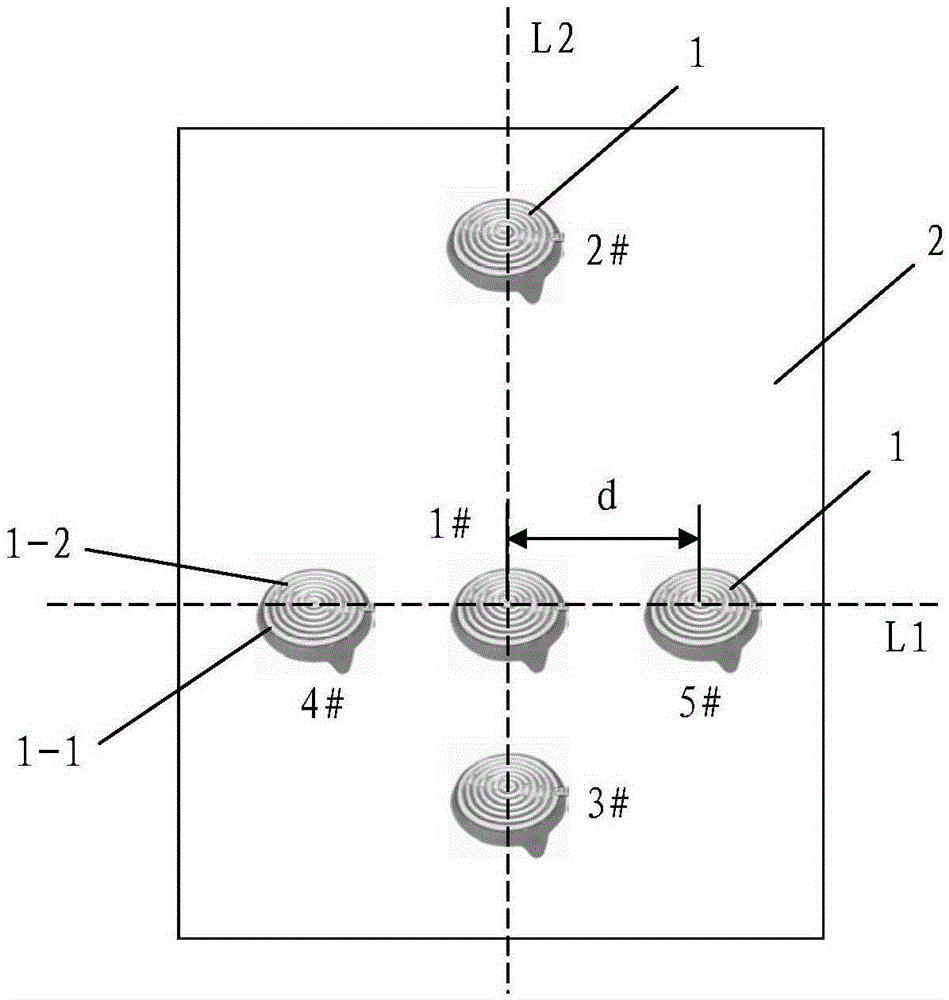
[0061] Such as figure 1 As shown, the thermal infrared ship landing cooperation target is composed of five heating electric furnaces 1 arranged on the same plane, and the structure, size and heating power of the five heating electric furnaces 1 are all the same; the five heating electric furnaces 1 are all It includes an electric hob 1-1 and an infrared heating element 1-2 arranged on the electric hob 1-1, the e...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
| Wavelength | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More