

Exoskeleton hand rehabilitation training device
A rehabilitation training and exoskeleton technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of large size of rehabilitation equipment, inability to carry adaptation and coordination, and achieve the effect of compact structure, reduced size, and simplified transmission structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
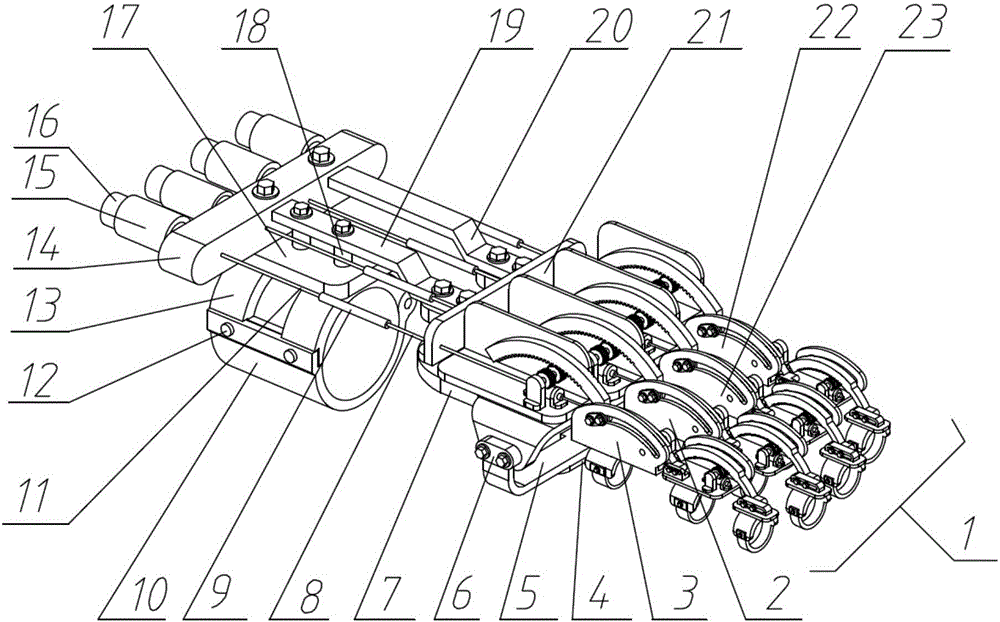
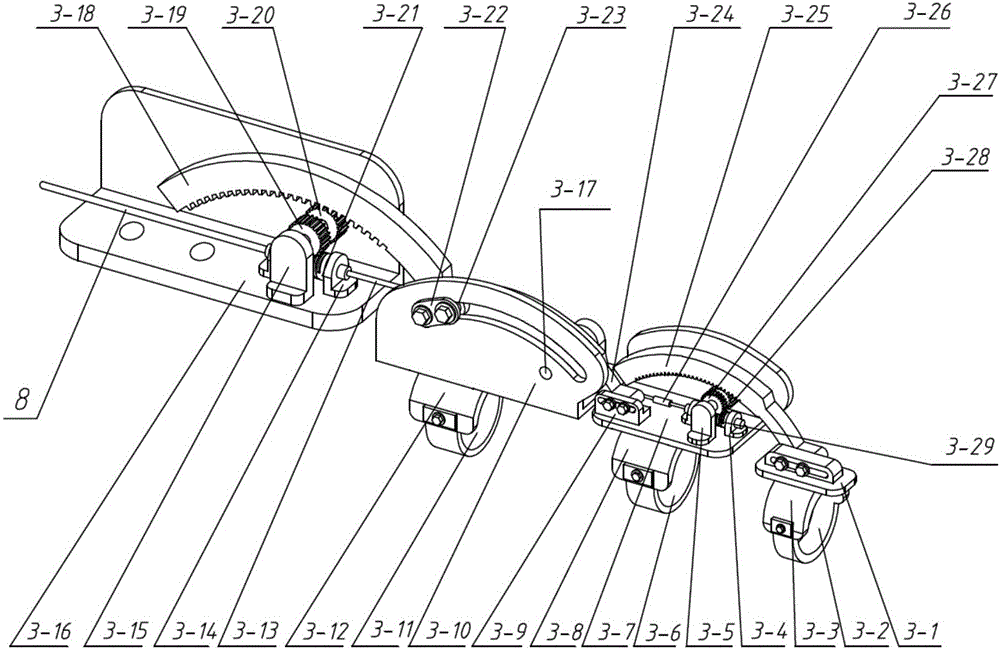
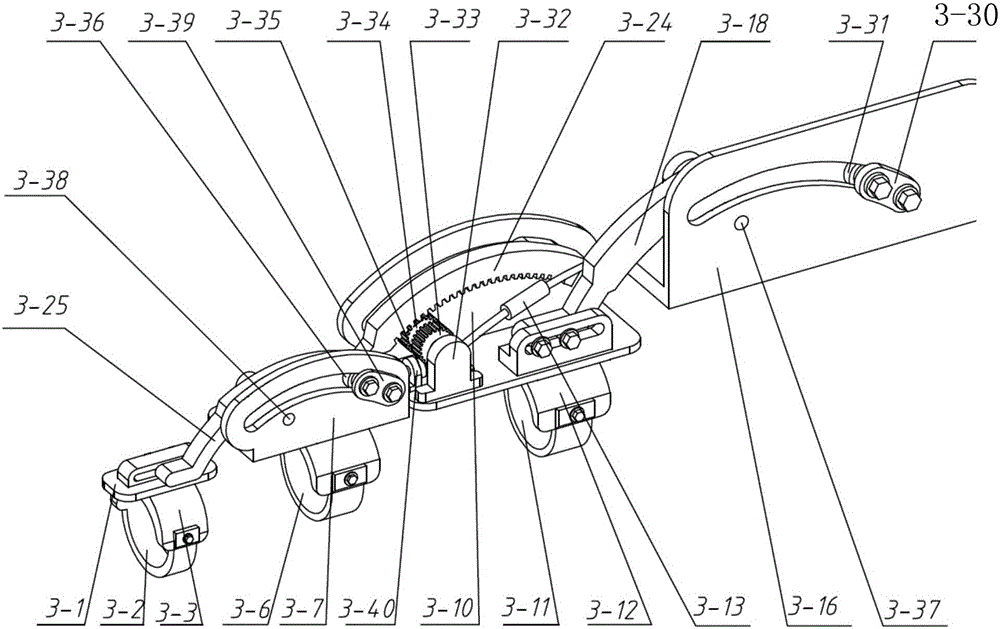
[0019] combine figure 1 , an exoskeleton hand rehabilitation training device, mainly includes a finger drive device, a hand support assembly, a wrist support assembly, and a motor drive device; the finger drive device is installed on the hand support assembly, the hand support assembly and the motor The driving device is installed on the wrist support assembly; the finger driving device includes exoskeleton index finger 3, exoskeleton middle finger 2, exoskeleton ring finger 23 and exoskeleton little finger 22, exoskeleton index finger 3, exoskeleton middle finger 2, exoskeleton ring finger 23 and The driving principle and structure of the exoskeleton little finger 22 are the same, but the specific size is different. The index finger 3 of the exoskeleton, the middle finger 2 of the exoskeleton, the ring finger 23 of the exoskeleton a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More