

Jellyfish-like underwater robot based on mollusk driver
A technology of underwater robot and software driver, which is applied in underwater operation equipment, ships, transportation and packaging, etc., can solve the problems of complex control system, low movement efficiency, inflexible steering, etc., and achieve convenient control system, simple structure, The effect of high steering flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to illustrate the technical scheme and technical purpose of the present invention, the present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
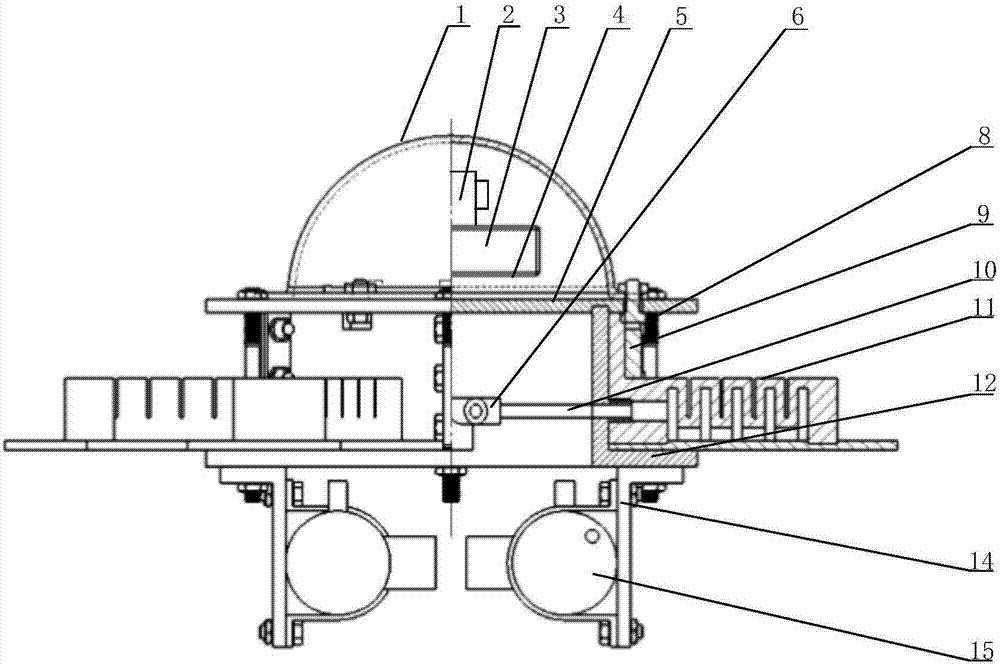
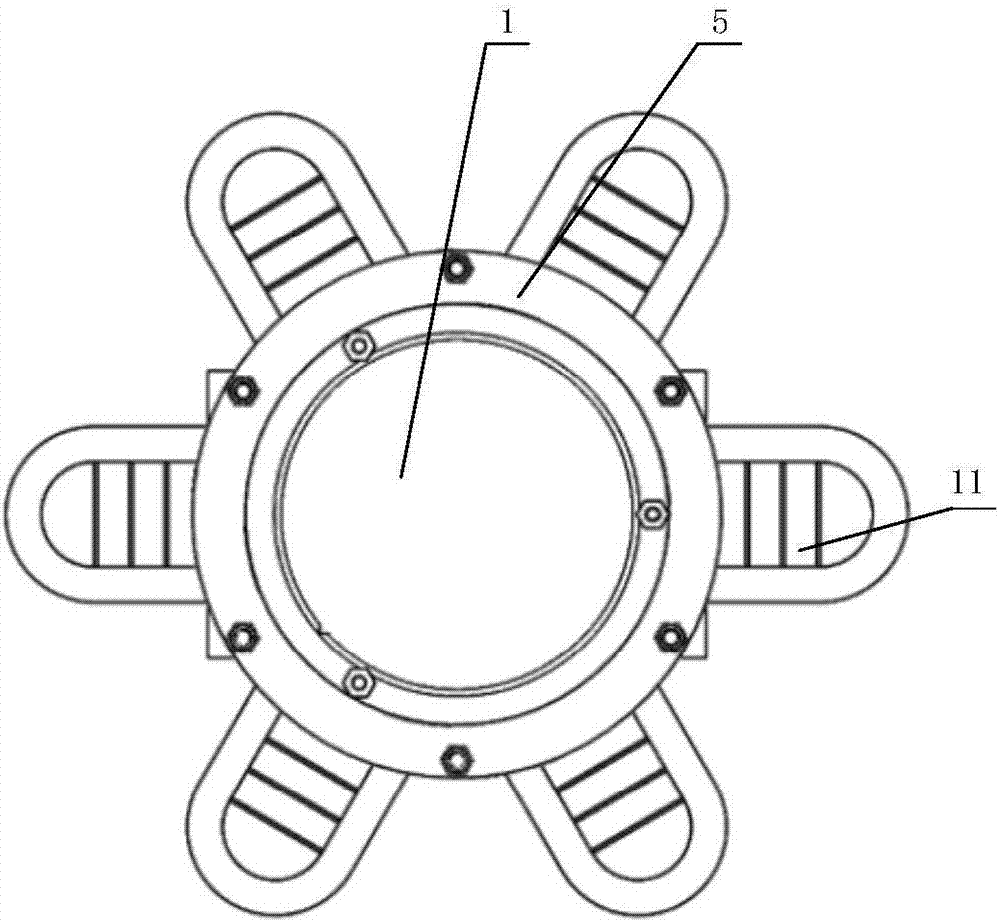
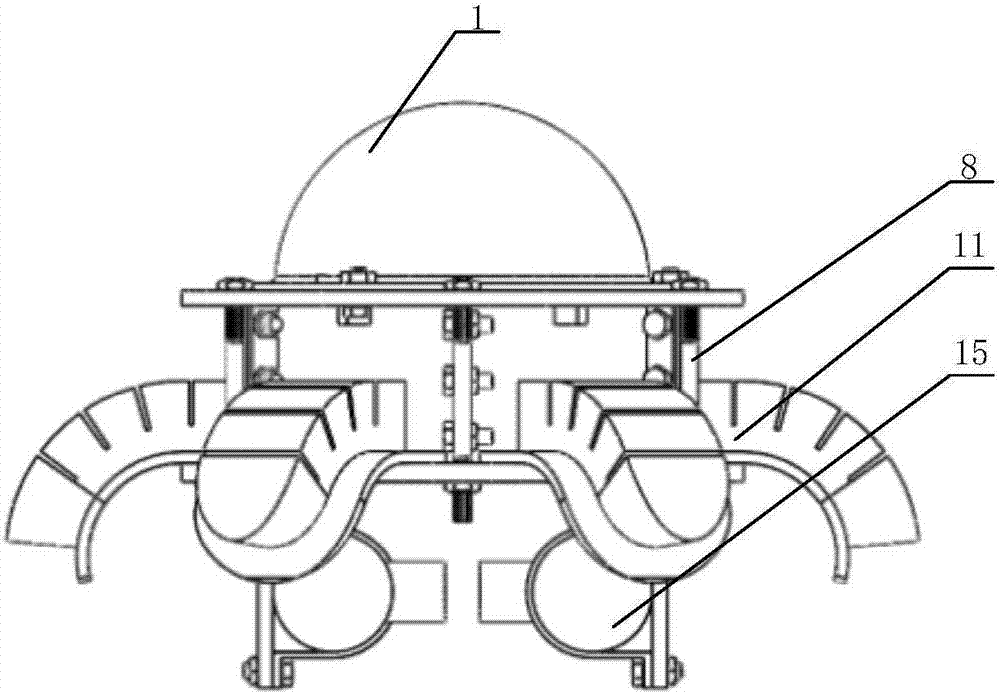
[0021] combine Figure 1-Figure 3 , a kind of imitation jellyfish underwater robot based on software driver of the present invention, comprises the sealing cabin of upper end, the fixing device of lower end, and control unit, software propulsion unit; Described sealing cabin is fixedly connected with fixing device; Described software propulsion unit Including soft tentacles 11 and pipes 10 connected to the soft tentacles 11; the number of the soft tentacles 11 is N (N≥3), uniformly fixed and installed on the upper end of the fixture for a week, as a flexible driver for the entire robot; the control unit , used to control the supply or cut off of pressurized fluid to the soft tentacles 11 through the pipeline 10, so that single or multiple soft tentacles...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More