

Method for achieving self-localization and map building of mobile robot
A mobile robot and autonomous positioning technology, applied in the field of robot navigation, can solve problems such as the influence of map accuracy and the inaccurate position of map features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
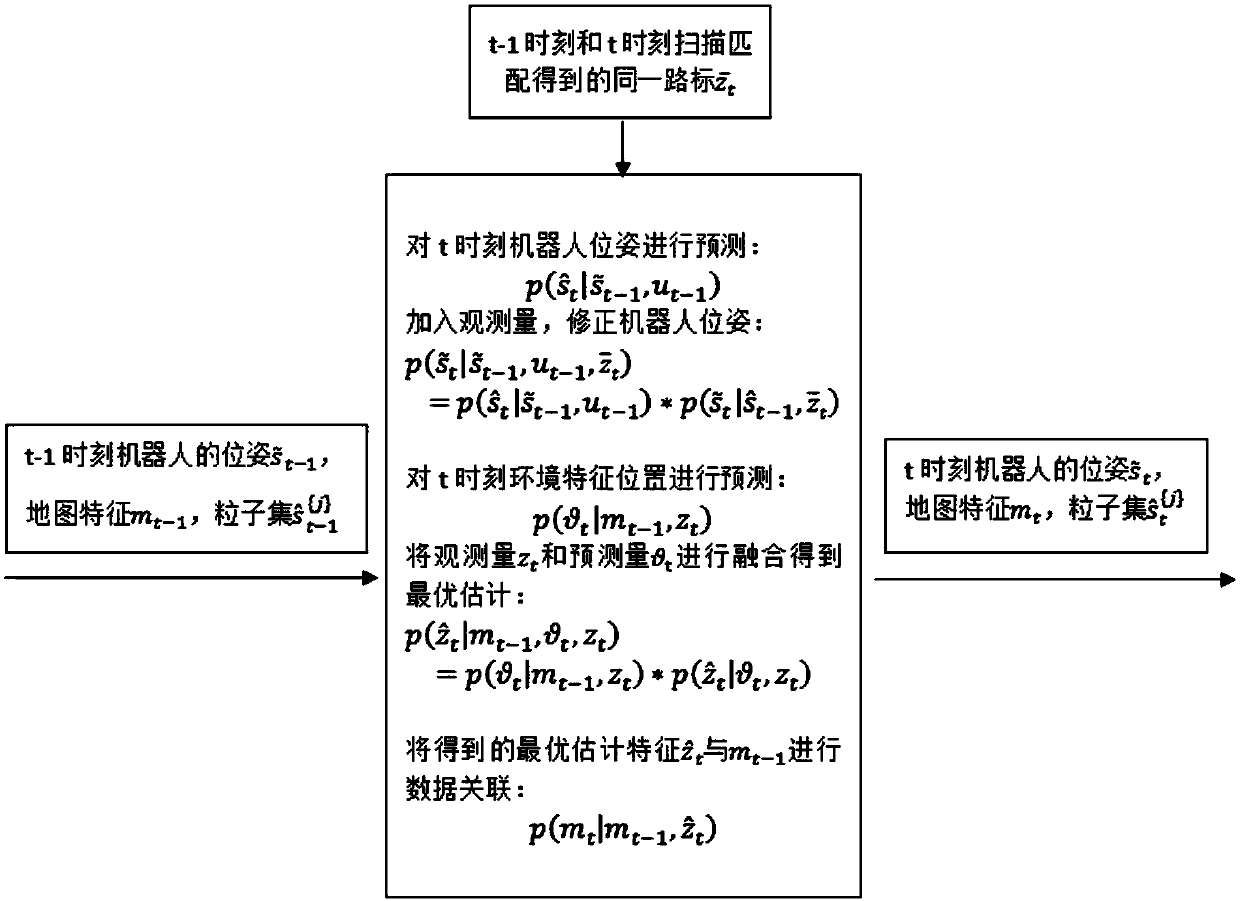
[0072] The method of the present invention is illustrated below with a robot with three sensors of odometer, compass and laser radar in an unknown environment.
[0073] The robot uses the information of the odometer to predict the pose of the robot; obtains the initial target heading with the compass and at the corner, obtains the deflection angle of the robot by means of the difference of the compass data; utilizes the laser radar to obtain the distance and angle information of the surrounding environment features; the present invention utilizes The above three sensors obtain the surrounding environment map while locating the position of the robot. The above formulas (1.1)---(1.4), (2.1)---(2.3) give the general calculation form, and the specific calculation form is related to the probability distribution of its design and the robot motion. The specific meanings of variables, functions and probability density functions in formulas (1.1)---(1.4), (2.1)---(2.3) are illustrated ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More