

Underwater vehicle positioning robust optimization method based on switch constraint
A robust optimization technology for underwater vehicles, applied in instruments, navigation, surveying and navigation, etc., can solve problems such as inability to realize error closed-loop processing capabilities, map construction errors, etc., to eliminate adverse effects and reduce error rates Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0038] Firstly, the underwater environment is arranged. Lay out five marker points underwater and set any two of them as the same point.
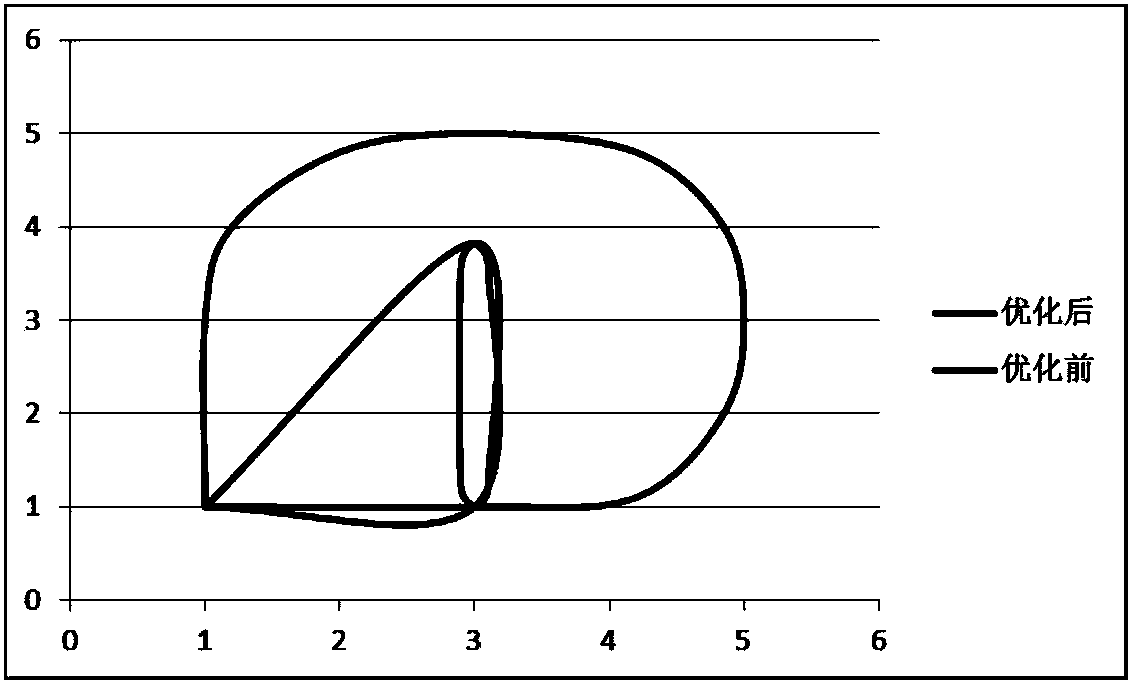
[0039] Determine the initial position of the underwater vehicle (x, z) = (0, 0); the speed of the vehicle v = 1m / s, the accuracy of the internal odometer is Gaussian white noise with a variance of 1, with the preset attached figure 2 path sailing.
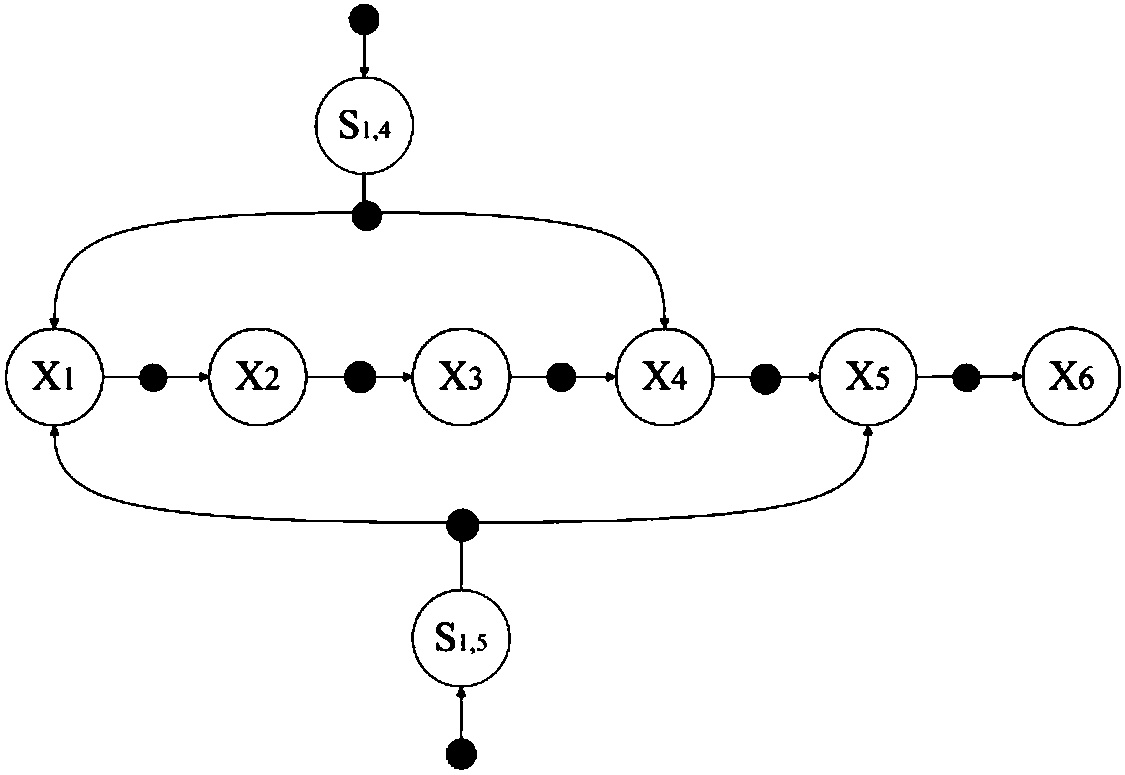
[0040] Step 1: Carry out map construction experiments underwater, and perform data fusion and build factor maps, as shown in the attached figure 1 As shown, and use the conditional probability distribution P(X|U) of the model to solve the SLAM pose graph problem. Where X represents the node pose and U represents the node constraint. Given a set of odometer ranging and closed-loop constraints u i , u ij ∈U, where u i Indicates any type of control input, with x i relevant, x...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More