

Method, device and system for positioning control of underactuated marine crane within limited time
A marine crane, limited time technology, applied in the direction of transportation and packaging, load hanging components, etc., to achieve the effect of eliminating residual swing, good control effect, and improved swing elimination performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0066] The purpose of Embodiment 1 is to provide a positioning control method for an underactuated marine crane within a limited time.
[0067] In order to achieve the above object, the present invention adopts the following technical scheme: according to the dynamic model of the driveable part of the marine crane, the second-order sliding surface is constructed, and the nonlinear bounded function related to the positioning error signal is introduced to construct the nonlinear controller, Ensure that the boom and rope reach the designated position within a limited time, and finally use the Lyapunov method to prove the stability of the system's equilibrium point. In addition, in order to eliminate the residual swing of the load as soon as possible, a coupling term related to the swing angular velocity is added to the controller to further improve the swing elimination performance of the control method. This method can complete the accurate control of the pitch angle of the boom...
Embodiment 2
[0183] The purpose of Embodiment 2 is to provide a computer-readable storage medium. In order to achieve the above object, the present invention adopts the following technical scheme:
[0184] A computer-readable storage medium, in which a plurality of instructions are stored, and the instructions can be loaded by the processor of the terminal device and perform the following processing:
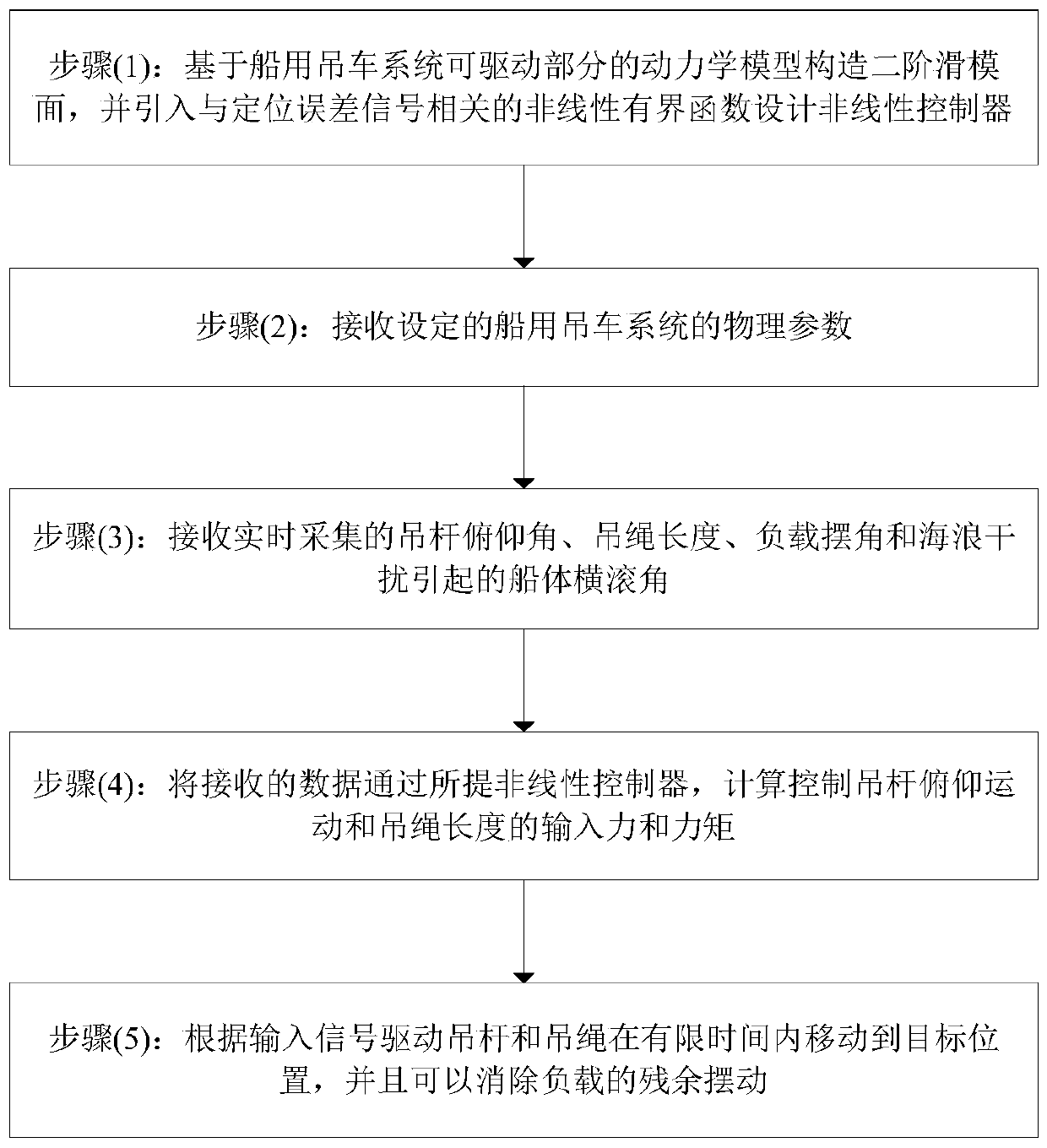
[0185] Step (1): Construct a second-order sliding surface based on the dynamic model of the driveable part of the marine crane system, and introduce a nonlinear bounded function related to the positioning error signal to construct a nonlinear controller;
[0186] Step (2): receiving the set physical parameters of the marine crane system;
[0187] Step (3): receiving the real-time collected boom pitch angle, suspension rope length, load swing angle and hull roll angle caused by wave interference;
[0188] Step (4): pass the received data through the proposed nonlinear controller to calculat...
Embodiment 3
[0191] The purpose of Embodiment 3 is to provide a terminal device. In order to achieve the above object, the present invention adopts the following technical scheme:
[0192] A terminal device includes a processor and a computer-readable storage medium, the processor is used to implement instructions; the computer-readable storage medium is used to store multiple instructions, and the scope of application of the instructions is the same as that in Embodiment 2. When these computer-executable instructions run in the device, the device executes the methods or processes described in the various embodiments disclosed in the present invention.
[0193] In this embodiment, a computer program product may include a computer-readable storage medium loaded with computer-readable program instructions for performing various aspects disclosed in the present invention. A computer readable storage medium may be a tangible device capable of storing instructions for use by an instruction exe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More