

Tree barrier cleaning air robot and method for telescopic and longitudinally curved working arm
An aerial robot and longitudinal bending technology, applied in agricultural machinery and implements, botanical equipment and methods, agriculture, etc., can solve the problems of low manual cleaning efficiency and high safety risks, so as to facilitate project realization and improve cleaning efficiency , Convenient and quick adjustment effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
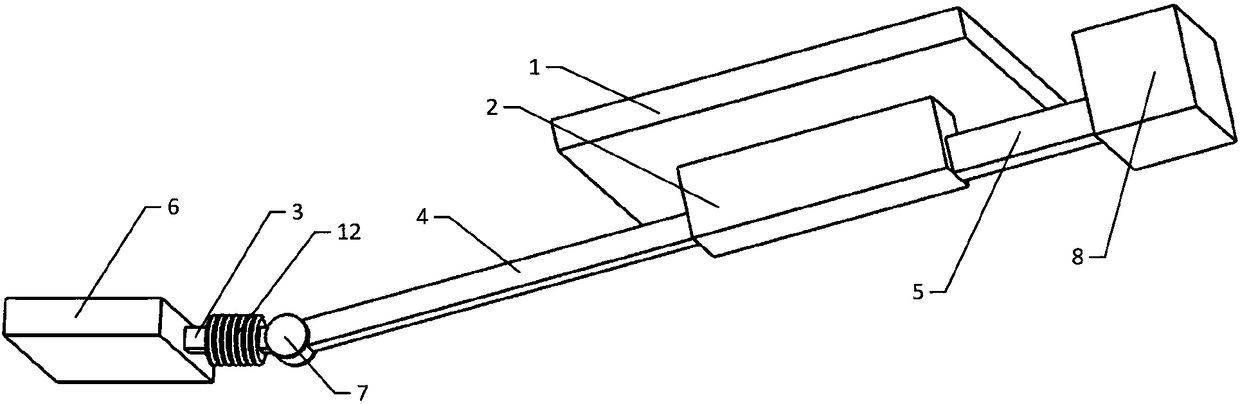
[0033] Embodiment 1: as Figure 1-Figure 2 As shown, a tree-block clearing aerial robot with a retractable and longitudinally curved operating arm includes a multi-rotor platform 1 that provides flight power for the aerial robot, a fuselage 2 fixedly connected directly below the multi-rotor platform 1, and located at the left and right sides of the aerial robot. The middle arm 4 and the rear arm 5 in the plane of symmetry and parallel to the longitudinal axis of the fuselage 2, the forearm 3 connected to the front end of the middle arm 4 through the longitudinal bending joint 7 with a built-in drive motor, the cutter assembly 6 fixedly connected to the front end of the forearm 3, The battery pack 8 fixedly connected to the rear end of the rear arm 5, the middle arm 4 and the rear arm 5 are coaxially movable and nested; the longitudinal bending joint 7 is similar to the mechanical arm of an existing robot, and the mechanical arm is driven by a motor and a reducer to bend, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More