

Fault-tolerant control method based on hidden Markov model
A fault-tolerant control and model technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of structural accuracy, low reliability, poor effect of model predictive control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0063] In this embodiment, a fault-tolerant control method based on a hidden Markov model comprises the following steps:
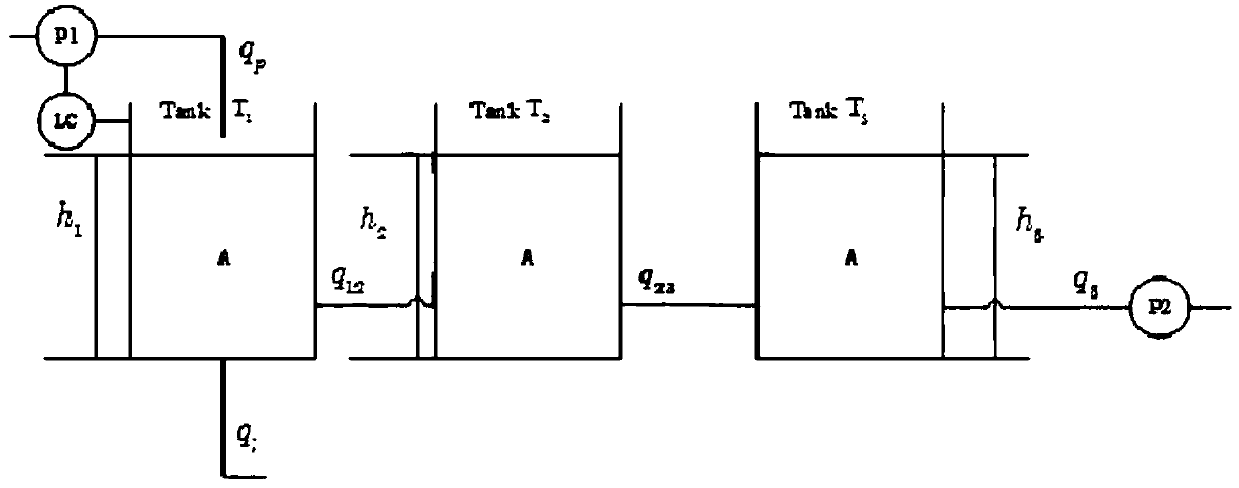
[0064] S1. Offline modeling, collecting training sample sets, using the offline data collected in the industrial process as the observation sequence of the hidden Markov model, and training the hidden Markov model; the specific process includes:
[0065] S11. Use a stochastic nonlinear system to describe the industrial process, and the stochastic nonlinear system is expressed by the following formula:
[0066]
[0067] Where t is the time index, and the superscript [i] represents the working condition index, Indicates the state of working condition i, n x is the number of state variables, Indicates control input, n u is the number of input variables, Indicates time-invariant model parameters, n θ is the number of model parameters, Indicates that with known finite covariance ∑ ω The zero-mean process noise of f [i] : Represents the model eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More