

Crawler-type robot with underwater posture changing function
A crawler-type, robot technology, applied in the directions of underwater operation equipment, manipulators, ships, etc., can solve the problems of energy-consuming working posture, difficulty of underwater robots, and difficulty in maintaining stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
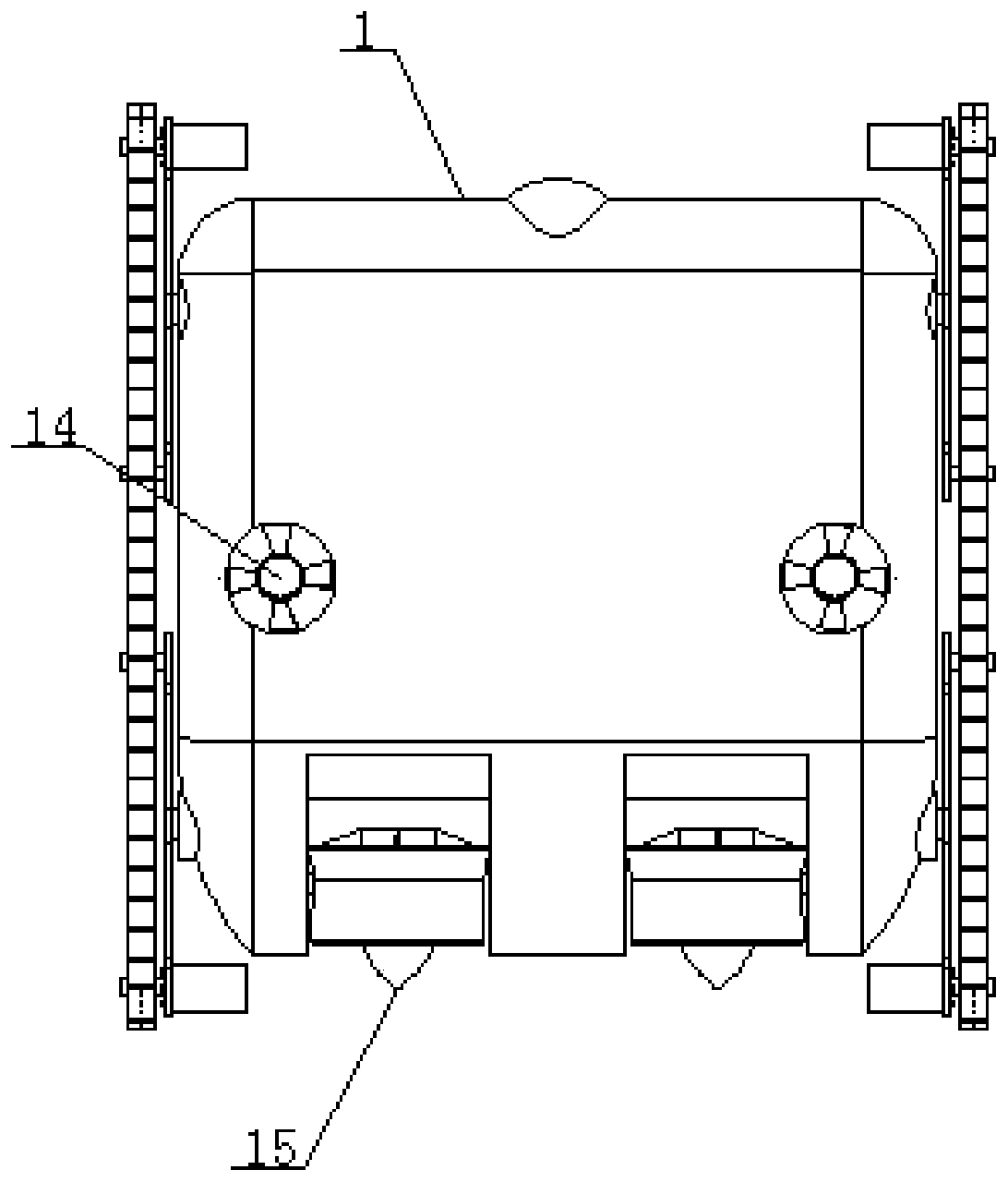
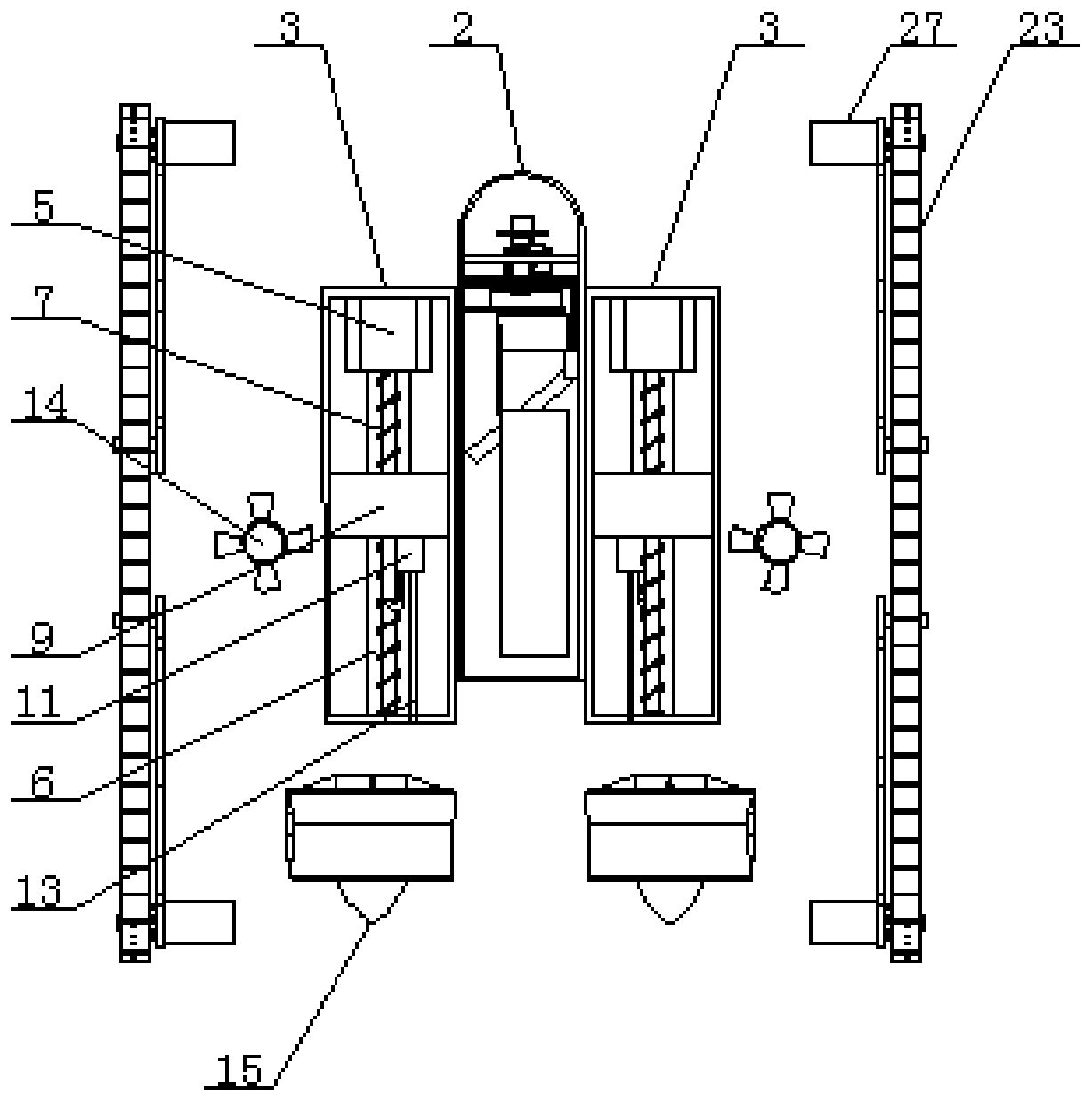
[0031] Specific implementation mode one: refer to figure 1 , figure 2 and image 3 Describe this embodiment in detail, a kind of crawler type robot of underwater posture change described in this embodiment includes housing 1, monitoring mechanism, vertical thruster 14, horizontal thruster 15 and two sets of crawler walking mechanisms, monitoring mechanism is arranged on The front end of the shell 1 is used for underwater monitoring. Two vertical propellers 14 are respectively arranged in the through holes on both sides above the shell 1 for the ups and downs and heeling of the underwater robot. When the two vertical propellers 14 generate When the force is in the same direction, the underwater robot floats or dives. When the two vertical propellers 14 produce different directions, the underwater robot will roll; two horizontal propellers 15 are arranged at the rear end of the shell 1 for The advance, retreat and steering of the underwater robot, when the two horizontal prop...
specific Embodiment approach 2
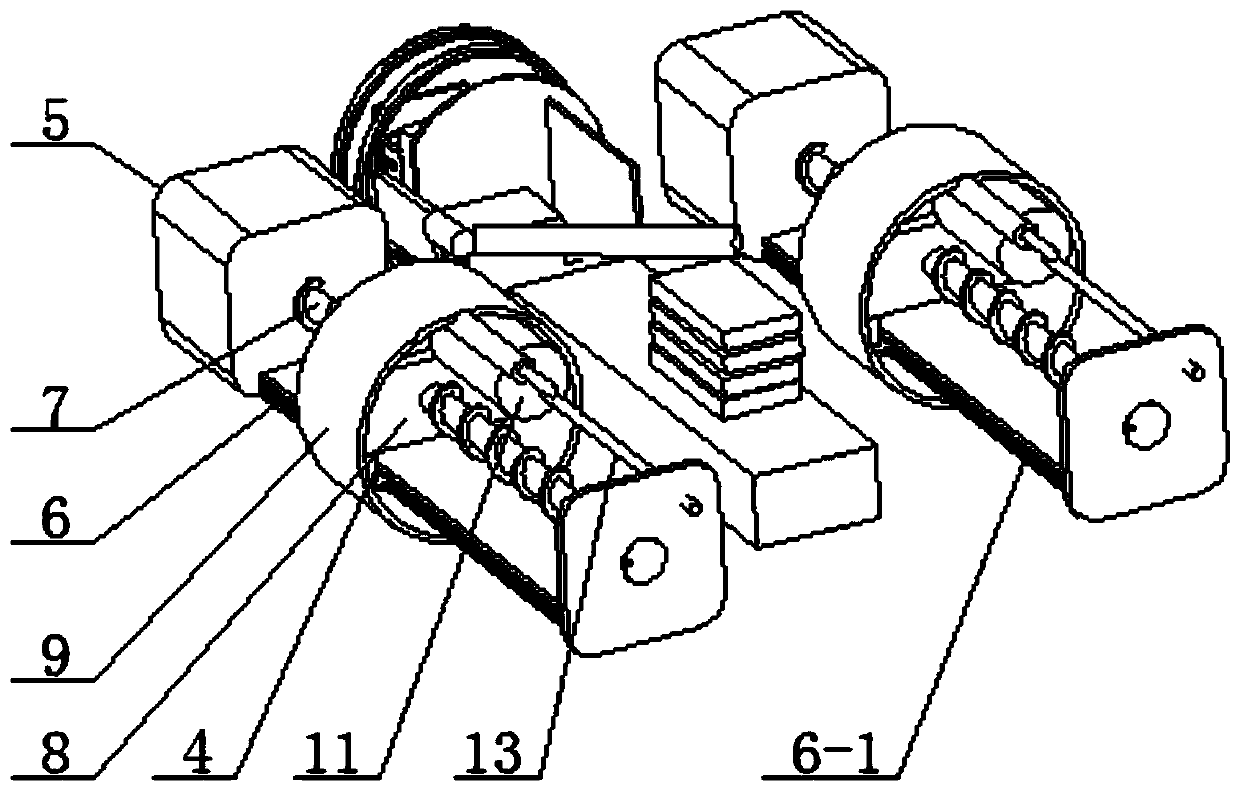
[0036] Specific implementation mode two: refer to image 3 Describe this embodiment in detail, in this embodiment, the two side walls of described guide plate 6 are respectively provided with slideway 6-1, and the two ends of lead screw nut 8 lower surface are respectively provided with a pulley 4, and pulley 4 and pulley Tract 6-1 Sliding connections.
[0037] Other compositions and connection methods are the same as those in Embodiment 1.
specific Embodiment approach 3
[0038] Specific implementation mode three: refer to Figure 4 to Figure 7Describe this embodiment in detail, in this embodiment, each crawler belt traveling mechanism comprises a crawler belt 23, two torque motors 24, two power gears 25, two load-bearing wheels 26, two crawler belt motors 27 and two connecting plates 28. Two torque motors 24 are arranged laterally side by side on the side end of the housing 1. The driving end of each torque motor 24 is fixedly connected to the middle of one side of a connecting plate 28, and the other side of the connecting plate 28 is One end of one end is provided with a power gear 25, and is rotationally connected with the power gear 25, and the other end of the other side of the connecting plate 28 is provided with a load-bearing wheel 26, and is rotatably connected with the load-bearing wheel 26; the specific structure is, the connecting plate 28 A round hole is respectively opened at both ends of each round hole, and a bearing is arrange...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More