

Autonomous obstacle surmounting and avoiding walking control method for six-track and four-swing-arm rescue robot
A rescue robot and walking control technology, applied in the field of robotics, can solve problems such as trapped rescue robots, complex disaster environments, and loss of robot signals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
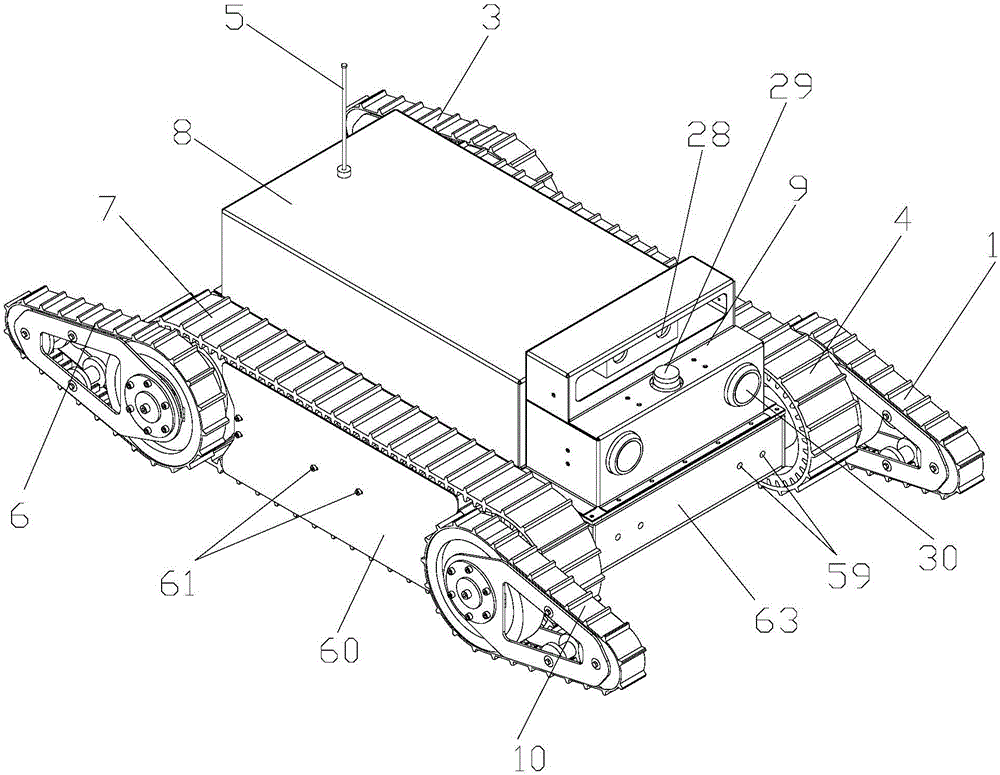
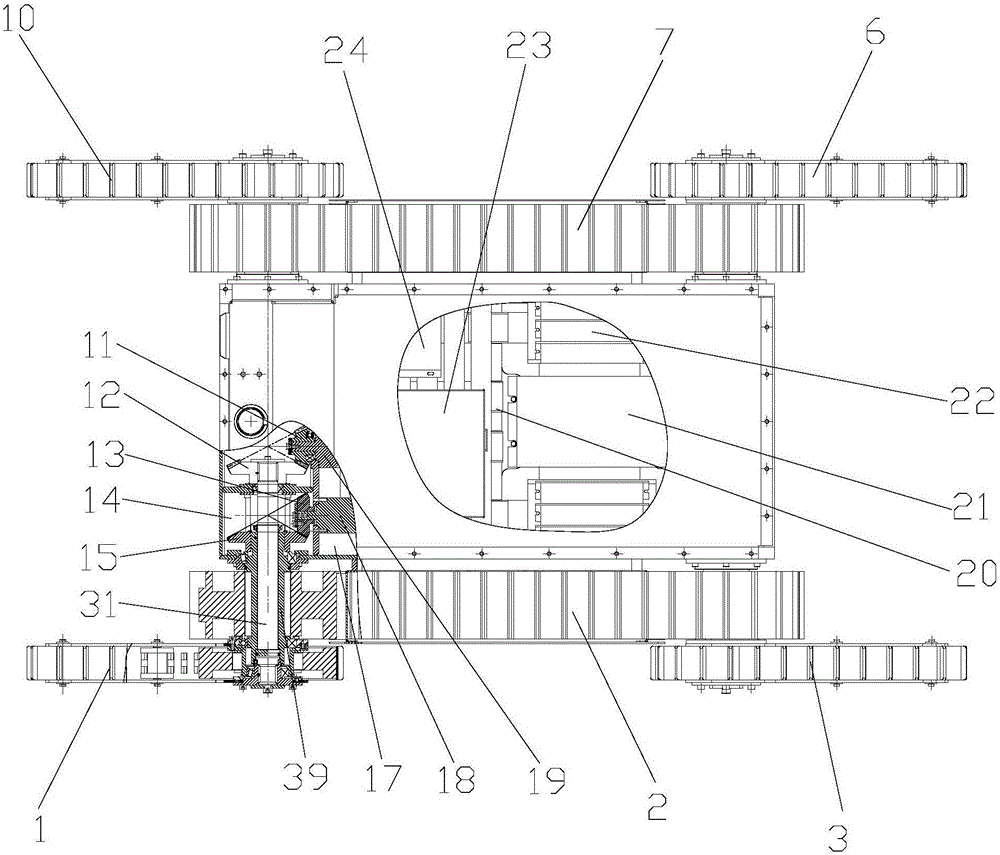
[0086] Such as Figure 1 ~ Figure 4 as well as Picture 12 As shown, the autonomous obstacle-crossing and obstacle avoidance walking control method of the six-track four-swing arm rescue robot of the present invention includes a robot control system, two walking crawler components and four swing-arm crawler components, The two walking track assemblies include a left walking track assembly 4 and a right walking track assembly 7. The left walking track assembly 4 and the right walking track assembly 7 have the same structure and both include an active walking wheel 14 located at the front end of the rescue robot and a rescue robot. At the rear end of the driven walking wheel 16, the four swing arm crawler assemblies include the left front swing arm crawler assembly 1, the left rear swing arm crawler assembly 3, the right front swing arm crawler assembly 10, and the right rear swing arm crawler assembly 6; the robot control system It includes a drive motor unit, a control computer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More