

Real-time obstacle avoidance method of collaborative robot
A robot and obstacle avoidance technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve the problems of local minimum, no obstacle avoidance strategy, etc., achieve good flexibility and avoid the effect of physical overrun
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0036] The real-time obstacle avoidance method of the collaborative robot provided in this embodiment mainly includes the following steps:
[0037] (1) Construction of obstacle avoidance model
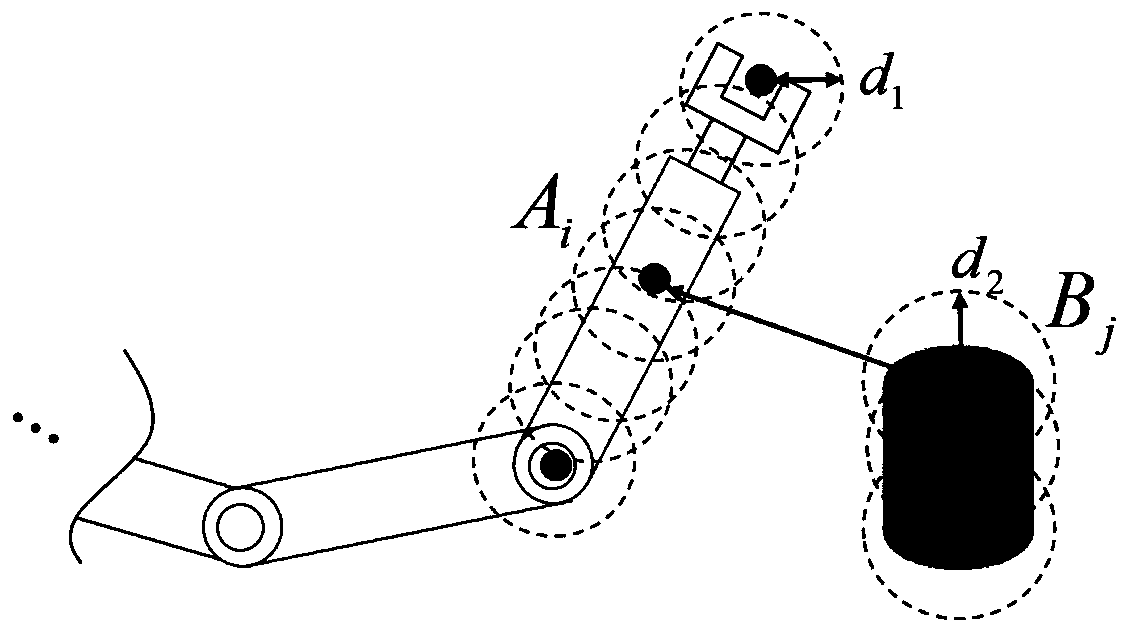
[0038] The schematic diagram of the obstacle avoidance of the robot arm is as follows: figure 1 shown. Since the mechanism information of the manipulator is consistent, a group of key points A can be evenly selected on each connecting rod of the manipulator body. i , and define a radius d 1 , so that at point A i is the center of the ball, d 1 A collection of a series of spheres with a radius of can completely surround the body of the manipulator; for example figure 1 As shown on the left; similarly, by obtaining the image information of the obstacle avoidance, select a group of B j and radius d 2 to wrap obstacles; in order to avoid collisions, select a certain margin Δd>0, and define a safety distance d=d 1 +d 2 +Δd, during the working process of the robot, if all A i and B...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More