

A control method and device for following a vehicle with an automatic driving vehicle
A control method and automatic driving technology, applied in the field of automobile control, can solve the problems of not considering the comfort of passengers, not satisfying the safety of following the car, etc., and achieve the effect of safety solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
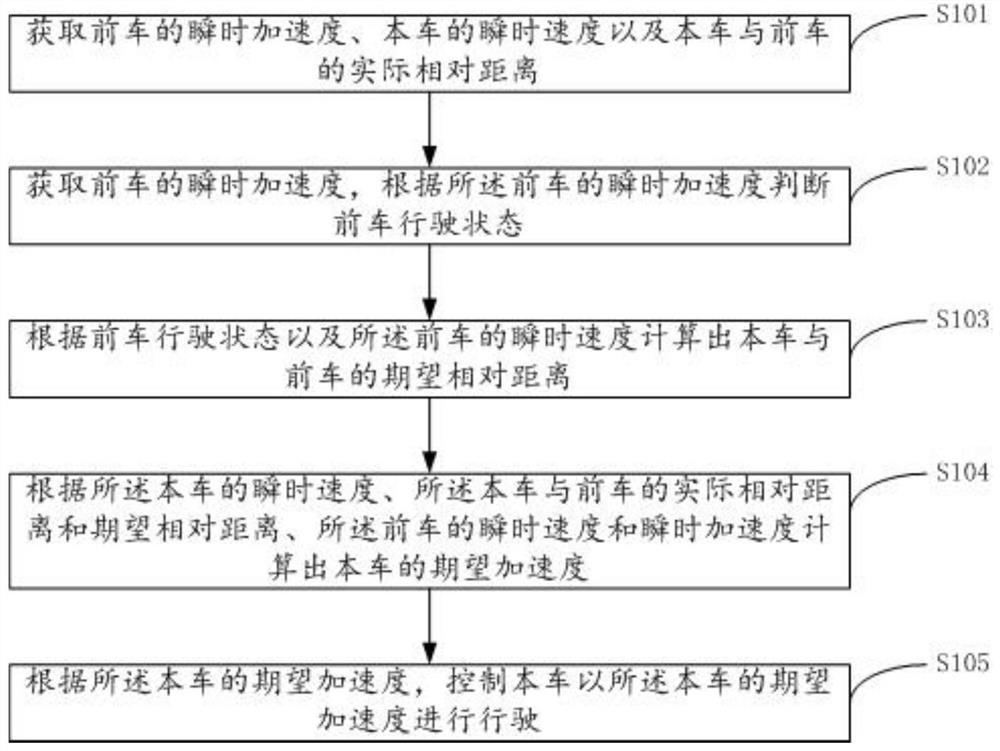
[0054]In this embodiment, the driving state of the vehicle in front is judged by the acceleration of the vehicle in front, which provides a basis for judging the different values of the same parameter for later calculation of the acceleration of the vehicle in front; Method: One method is to judge only based on the instantaneous acceleration of the current vehicle in front, but this judgment method has a flaw, that is, when the driving state is changing, it is judged only based on the instantaneous acceleration of the vehicle in front, which may cause errors in subsequent calculations Another way is to average a series of instantaneous accelerations of the vehicle in front in a short period of time, so that the average acceleration can better reflect the real driving state of the vehicle in front; for another way, the specific implementation method is as follows:
[0055] Periodically acquire the instantaneous acceleration of the vehicle in front and store it in the memory ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More