

Point cloud data registration and updating method and device, equipment and storage medium
A point cloud data and cloud data technology, applied in the computer field, can solve the problems of limited registration quality, low registration efficiency, low registration accuracy of local point cloud data, etc., to ensure registration accuracy, improve registration accuracy, The effect of improving the efficiency of point cloud update
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
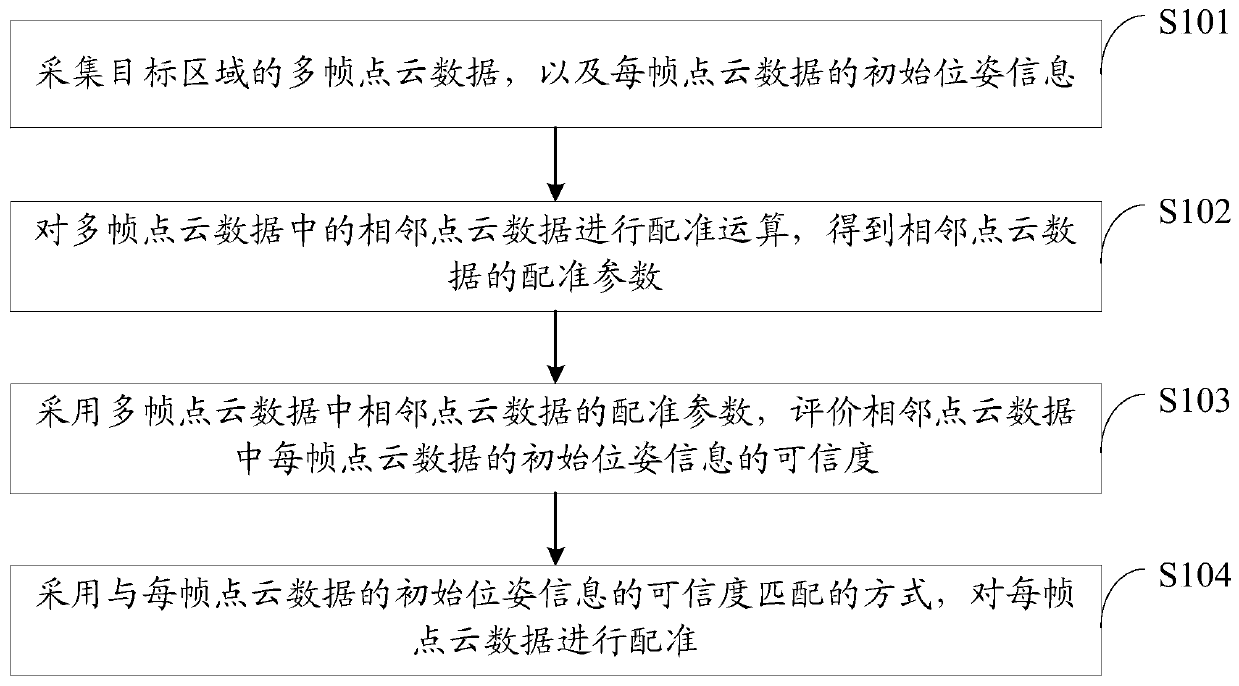
[0091] Embodiment 1 of the present invention provides a registration method for point cloud data, the flow chart of which is as follows figure 1 As shown, it can be applied to the registration of the collected multi-frame point cloud data for splicing. The method is executed by a point cloud data registration device, which is implemented by software and / or hardware, and is specifically configured in electronic equipment with certain data computing capabilities. The electronic equipment may be integrated in the collection vehicle, or be independent from and communicated with the collection vehicle.
[0092] Collection vehicles include but are not limited to cars, cars, buses and other road vehicles, and can be unmanned vehicles or manned vehicles. The collection vehicle includes: the vehicle body, the lidar equipment mounted on the vehicle body, the inertial measurement unit and the positioning device.
[0093] The laser radar device is used to periodically emit laser light a...
Embodiment 2
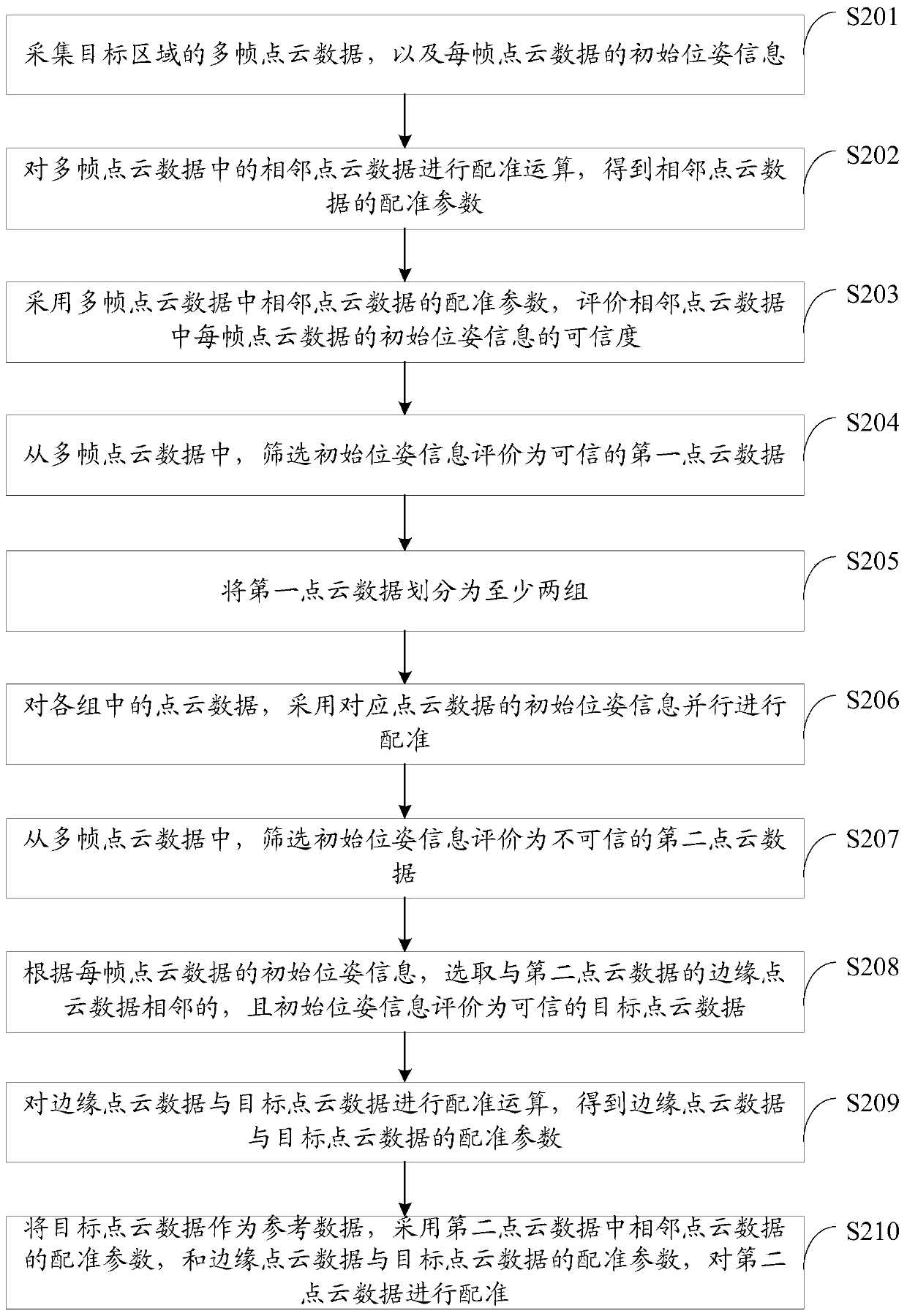
[0116] figure 2 It is a flow chart of a point cloud data registration method in Embodiment 2 of the present application. The embodiment of the present application is optimized and improved on the basis of the technical solutions of the above-mentioned embodiments.
[0117] Further, the operation "using the initial pose information of the first point cloud data to register the first point cloud data" is refined into "dividing the first point cloud data into at least two groups; for the points in each group Cloud data, using the initial pose information of the corresponding point cloud data for parallel registration".
[0118] Further, the operation "using the registration parameters of adjacent point cloud data in the second point cloud data to register the second point cloud data" is refined to "according to the initial pose information of each frame of point cloud data, select It is adjacent to the edge point cloud data of the second point cloud data, and the initial pose i...
Embodiment 3
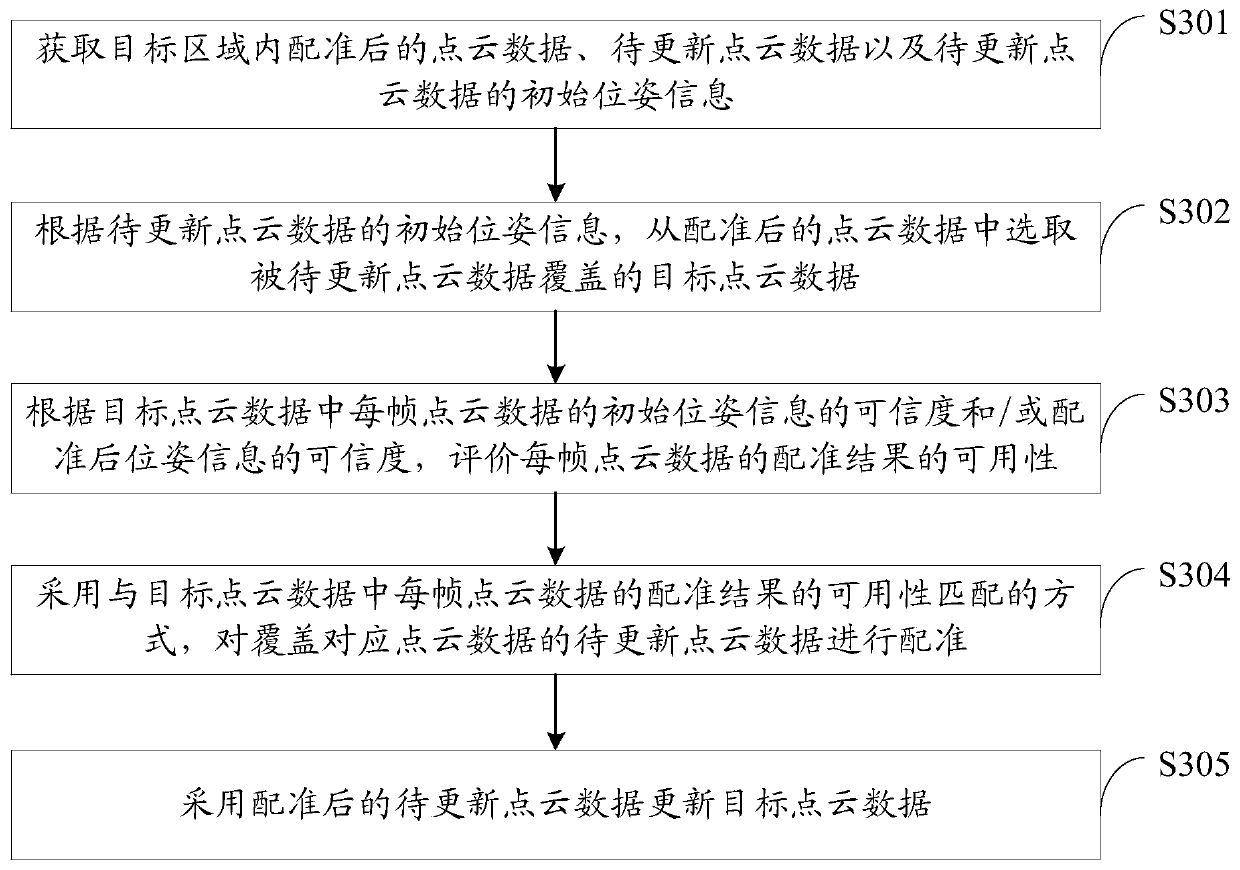
[0142] image 3 It is a flow chart of a method for updating point cloud data in Embodiment 3 of the present application, and this method is applicable to the case of updating registered point cloud data. The method is executed by an updating device for point cloud data, which is implemented by software and / or hardware, and is specifically configured in electronic equipment with certain data computing capabilities. The electronic equipment may be integrated in the collection vehicle, or be independent from and communicated with the collection vehicle. For the description of the collection vehicle, refer to the above-mentioned embodiments for details, and no further description is given here.
[0143] Such as image 3 A method for updating point cloud data is shown, including:
[0144] S301. Acquire the registered point cloud data in the target area, the point cloud data to be updated, and the initial pose information of the point cloud data to be updated.
[0145] Collect m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More