

Terminal traction upper limb rehabilitation training device
A technique of rehabilitation training and terminal traction, applied in passive exercise equipment, physical therapy, etc., can solve the problems of upper limb ligaments that cannot be stretched in all directions, single mode, and patient injury, so as to achieve good rehabilitation training effect and improve control performance, impact mitigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
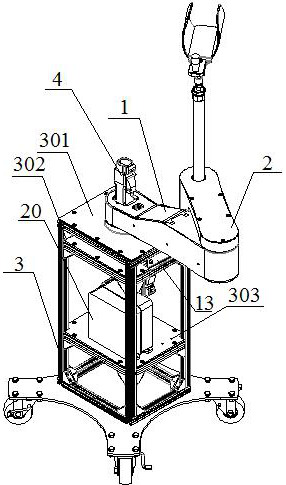
[0034] As shown in the accompanying drawings, a terminal traction upper limb rehabilitation training device includes a robot body, a robot support mechanism and a control drive unit. Three degrees of freedom, the robot support mechanism includes a support column 3 for supporting the robot body, the bottom of the support column 3 is provided with a chassis, and sliding wheels are provided around the chassis to make it easy to move, saving time and effort ;
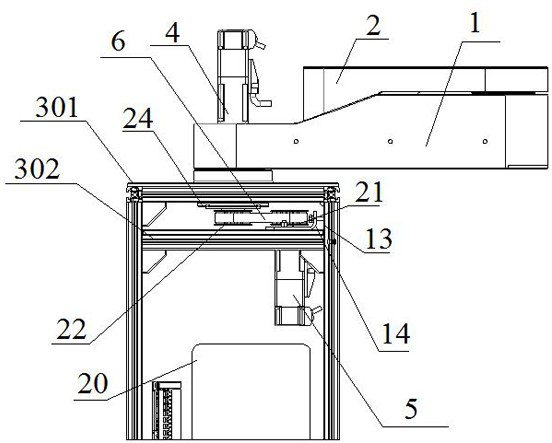
[0035] The supporting column 3 is a rectangular frame structure, the top of the supporting column 3 is provided with a first mounting plate 301, and a second mounting plate 302 and a third mounting plate 303 are arranged horizontally below the first mounting plate 301;
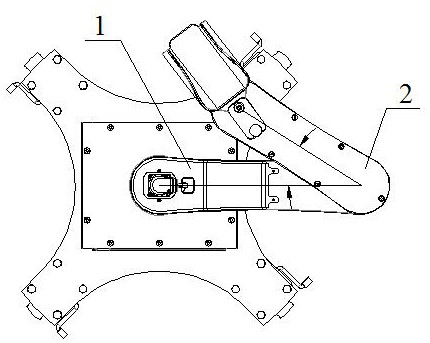
[0036] The bottom of one end of the boom 1 is horizontally arranged on the first mounting plate 301 through the boom reducer 24 , and the boom reducer 24 is installed through the first mounting plate 301 . Between the plates 303 is provided a drive transmi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More