

A six-dimensional operating handle for manipulator control
A technology for operating handles and robotic arms, applied in the field of machinery, can solve problems such as difficult operation, difficulty for users to master control methods, and few applicable scenarios
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the technical problems and technical solutions to be solved by the present invention clearer, a six-dimensional operating handle for mechanical arm control provided by the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments, which is the description of the present invention. explain rather than qualify.
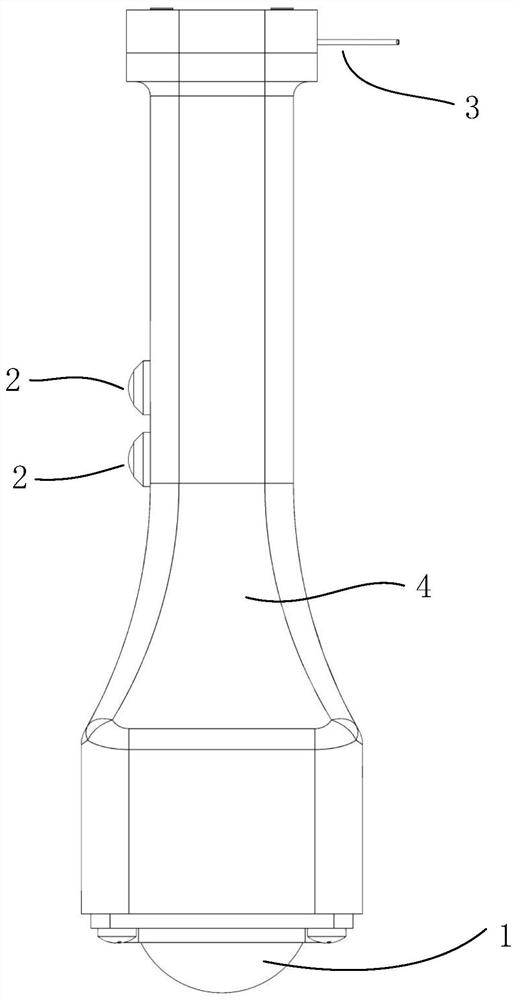
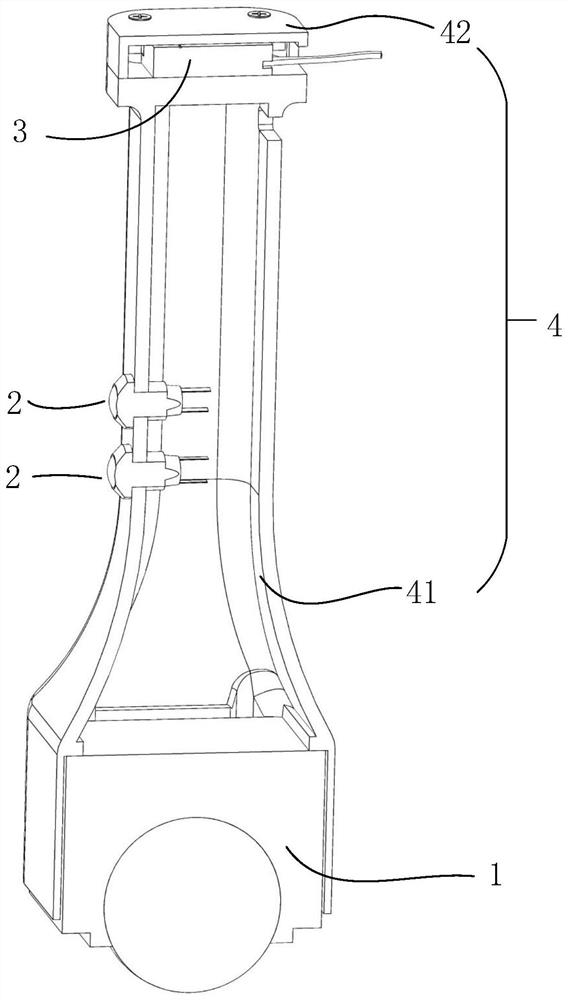
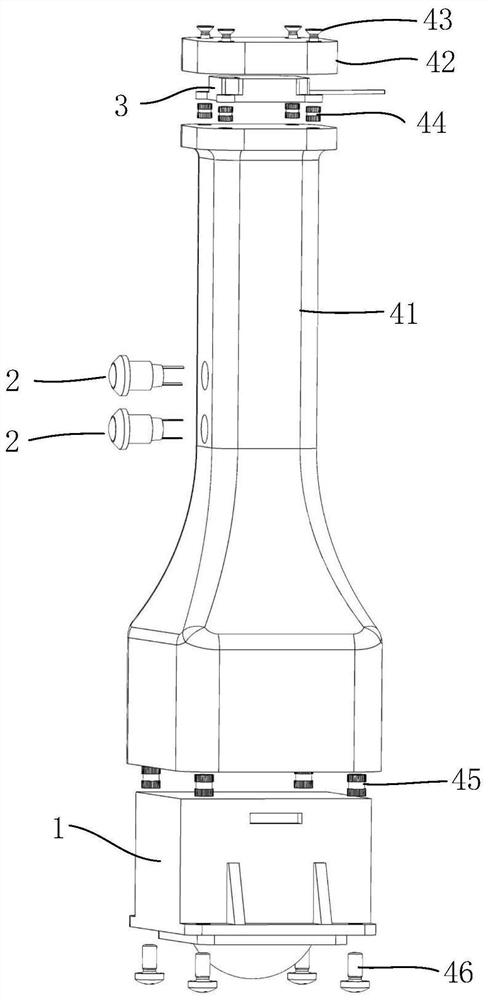
[0037] Such as figure 1 As shown, a six-dimensional operating handle for manipulator control is used to manipulate a manipulator with six degrees of freedom or less than six degrees of freedom, including a handle main body 4, a controller and an embedded handle mounted on the handle main body 4 Photoelectric trackball 1, Z-direction motion switch 2 and IMU attitude sensor 3, a working plane 5 (desktop in this embodiment) for photoelectric trackball rolling is provided below the handle main body 4, and described IMU attitude sensor 3 is used for In order to detect the attitude information of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More