

Piezoelectric-driven underwater detection robot
An underwater robot, piezoelectric drive technology, applied in the direction of generator/motor, piezoelectric effect/electrostrictive or magnetostrictive motor, underwater ships, etc., can solve the problem of propeller damage, cavitation, and the robot cannot drive and other problems, to achieve the effect of easy attitude control, maneuverability and strong maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
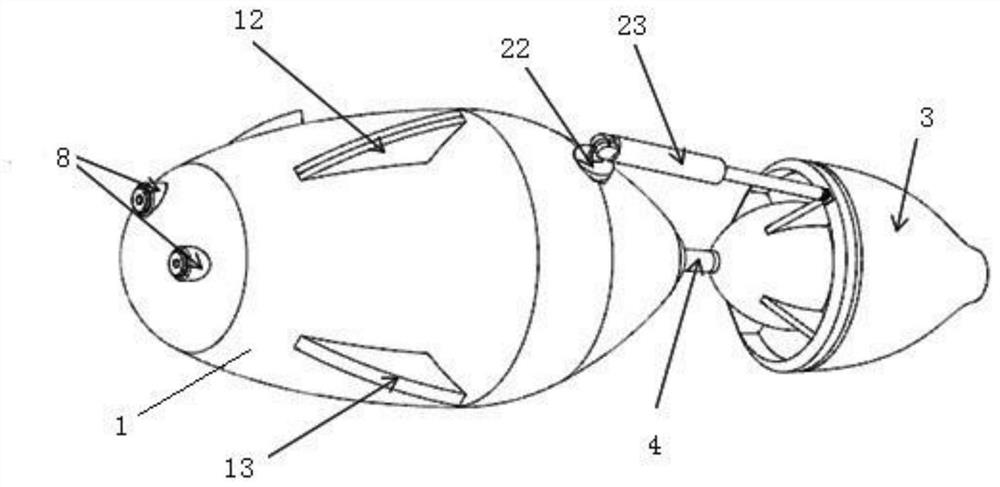
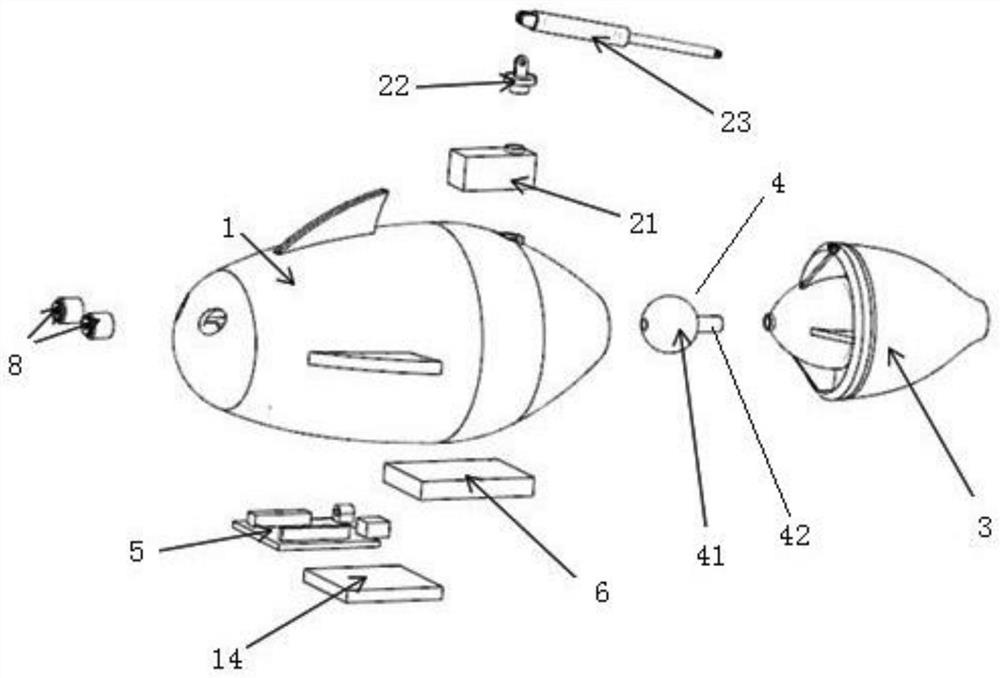
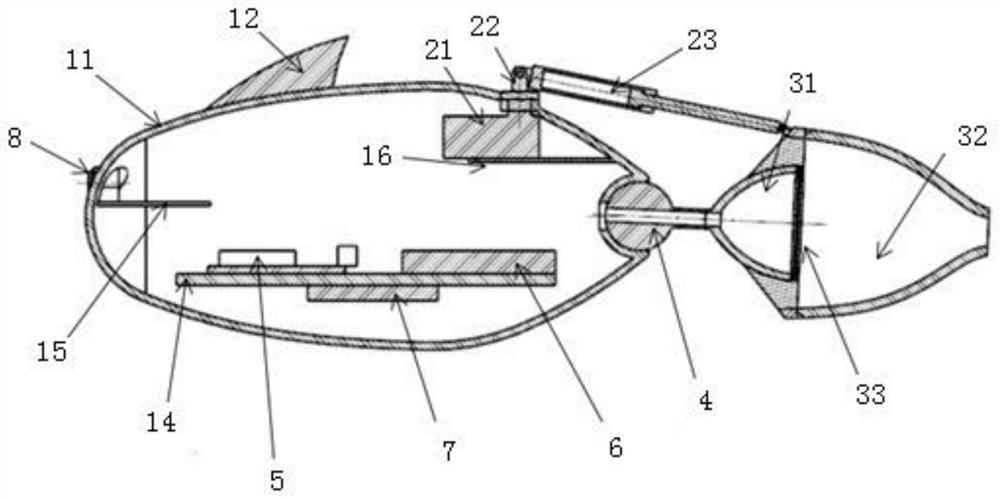
[0016] Such as Figure 1-5 In the shown embodiment, the piezoelectrically driven underwater detection robot includes a robot body 1, a steering mechanism 2, a piezoelectric thruster 3 and a power supply 6, wherein the robot body 1 includes a housing 11, and the front end of the housing 11 is provided with two The underwater detection camera 8, the underwater detection camera 8 is fixed on the second fixed plate 15 inside the housing 11 and protrudes from the opening at the front end of the housing 11; the present invention carries out bionic design with reference to the fish structure, A dorsal fin 12 and two side fins 13 are arranged on the outer wall of 11, and the side fins 13 are arranged on both sides of the housing 11 with the plane where the dorsal fin 12 is located as a symmetrical plane. In this embodiment, the dorsal fin 12 and the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More