

Six-dimensional control device for B-ultrasonic robot
A control device and robot technology, applied in the field of robots, can solve the problems that users are difficult to master the control method, lack of multi-degree-of-freedom robot control methods, and limit the development of medical robots, etc., and achieve easy replacement, low cost, and high reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
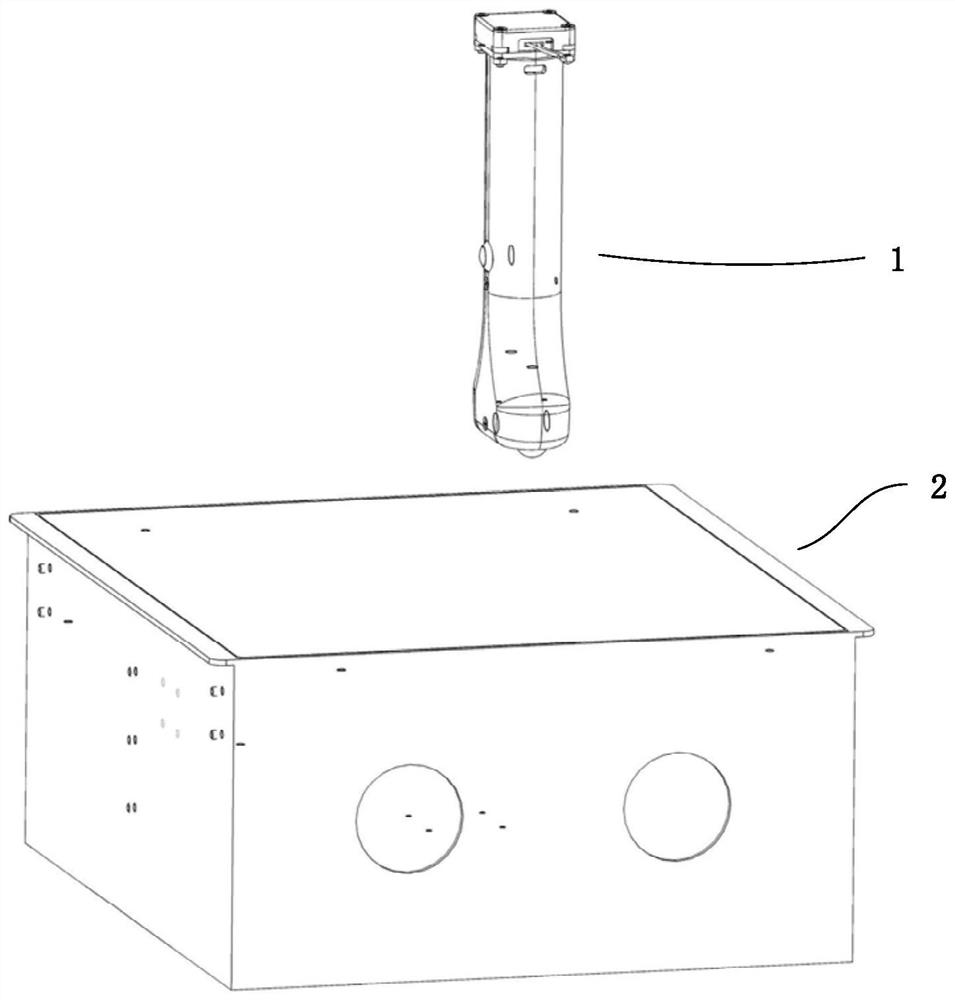
[0039] A six-dimensional control device for B-ultrasound robots, the overall appearance of which is shown in figure 1 As shown, it includes two parts: control pen 1 and control box 2.
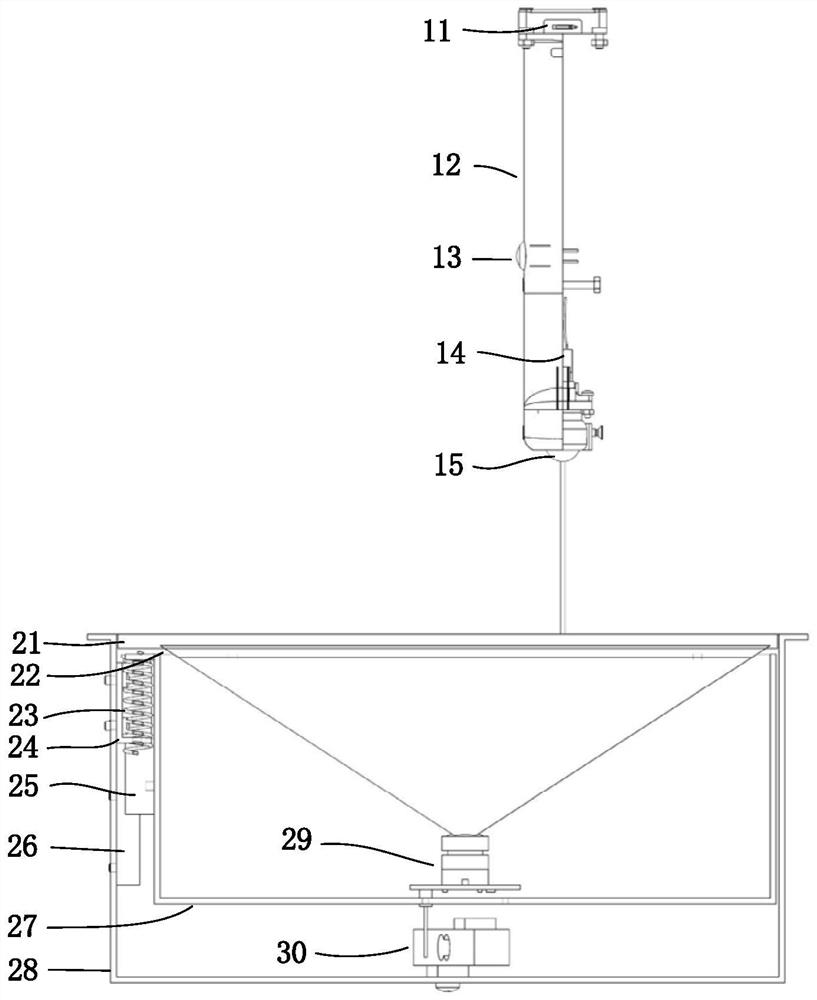
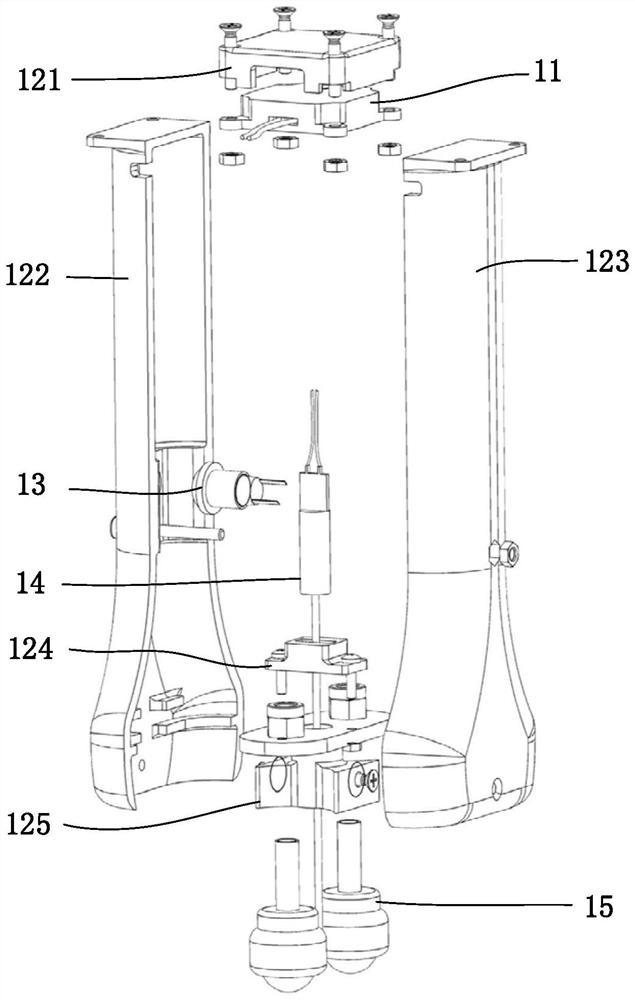
[0040] Such as figure 2 and 3 As shown, the control pen 1 includes an IMU module 11, a pen body housing 12 containing internal printing components, a self-resetting button switch 13, a laser emitting module 14, two nylon universal balls 15, screw and nut connectors, and an IMU sealing cover 121 , the laser module locking cover 124 , and the central connecting body 125 .
[0041] The pen body housing 12 is divided into a pen body housing left part 122 and a pen body housing right part 123 .
[0042] The IMU module 11 is installed on the top of the pen housing 12, and the IMU sealing cover 121 covers the IMU module 11 from above, so as to avoid collision damage of the IMU module 11 during use.
[0043] Self-resetting button switch 13 uses a flat nut to be installed on the pen body housing 12...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More