

A Mirror Rehabilitation Training Method Based on Adaptive Impedance Control
A technology of impedance control and control method, which is applied in the field of medical rehabilitation, can solve the problems of only considering the active intention, not considering the active intention of the affected side, and not being able to restore the patient's movement function well, so as to improve exercise ability and rehabilitation efficiency , the effect of good training effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
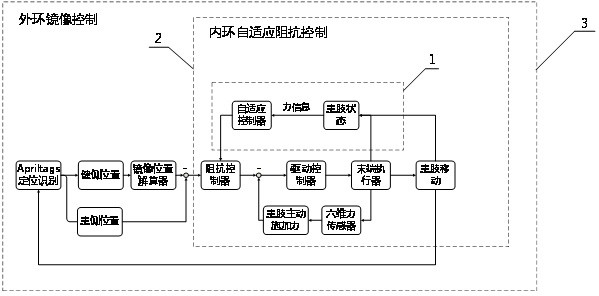
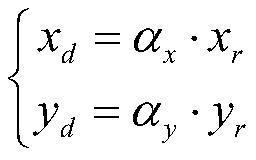
[0042] The specific embodiment is as follows: firstly in the outer ring mirror module 3, methods such as vision are used to identify the positions of the affected side and the healthy side respectively, and then the desired position of the affected side is solved by the mirror position solver, and the formula is:
[0043]
[0044] where x d and y d The desired position coordinates of the affected side solved for the mirror position solver, x r and y r is the actual position of the healthy side, α x is the mirror image solution coefficient in the x direction, α y is the mirror resolution coefficient in the y-direction. general alpha x and α y The value range of is {-1, 1}.
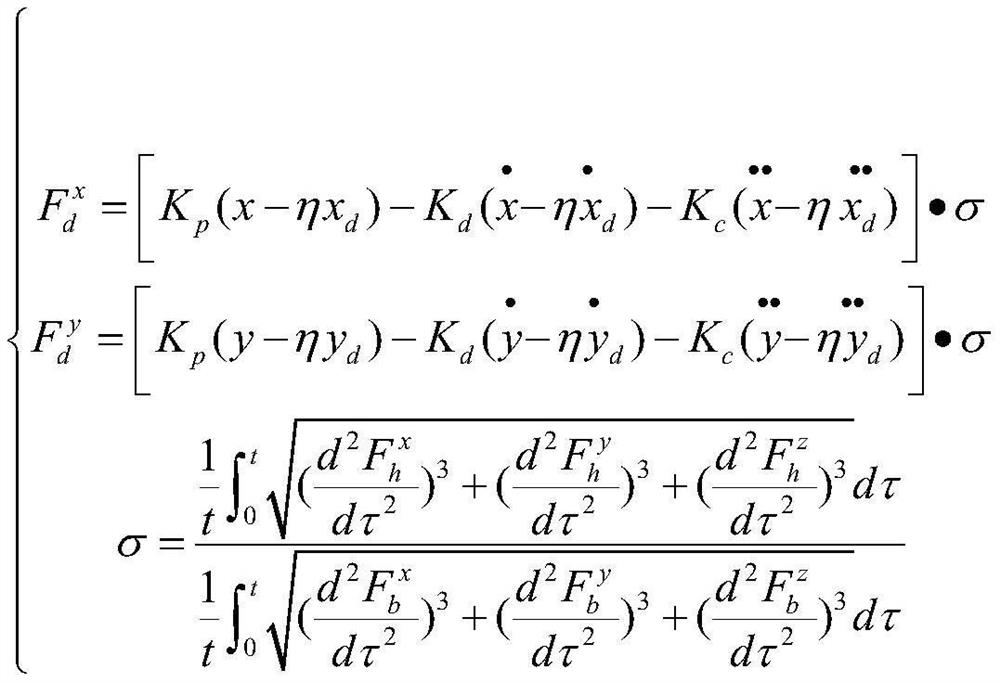
[0045] Then the output of the outer loop mirror control module 3 is the position deviation x-x between the actual position of the affected side and the desired position of the affected side d and y-y d, as the input of the inner loop adaptive impedance module 2. The impedance controller convert...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More