

A class-level 6d pose and size estimation method and device
A size and pose technology, applied in the field of category-level 6D pose and size estimation, can solve problems such as poor generalization ability, limited potential of mobile devices, difficulty in fully exploring and utilizing D channel geometric information in fusion methods, etc. The effect of small error and good generalization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] In order to make the technical means, creative features, goals and effects realized by the present invention easy to understand, a class-level 6D pose and size estimation method and device of the present invention are described in detail below with reference to the embodiments and the accompanying drawings.
[0032]
[0033] A class-level 6D pose and size estimation method and apparatus in this embodiment is to estimate an instance object (ie, a target object) whose class is known but not seen.
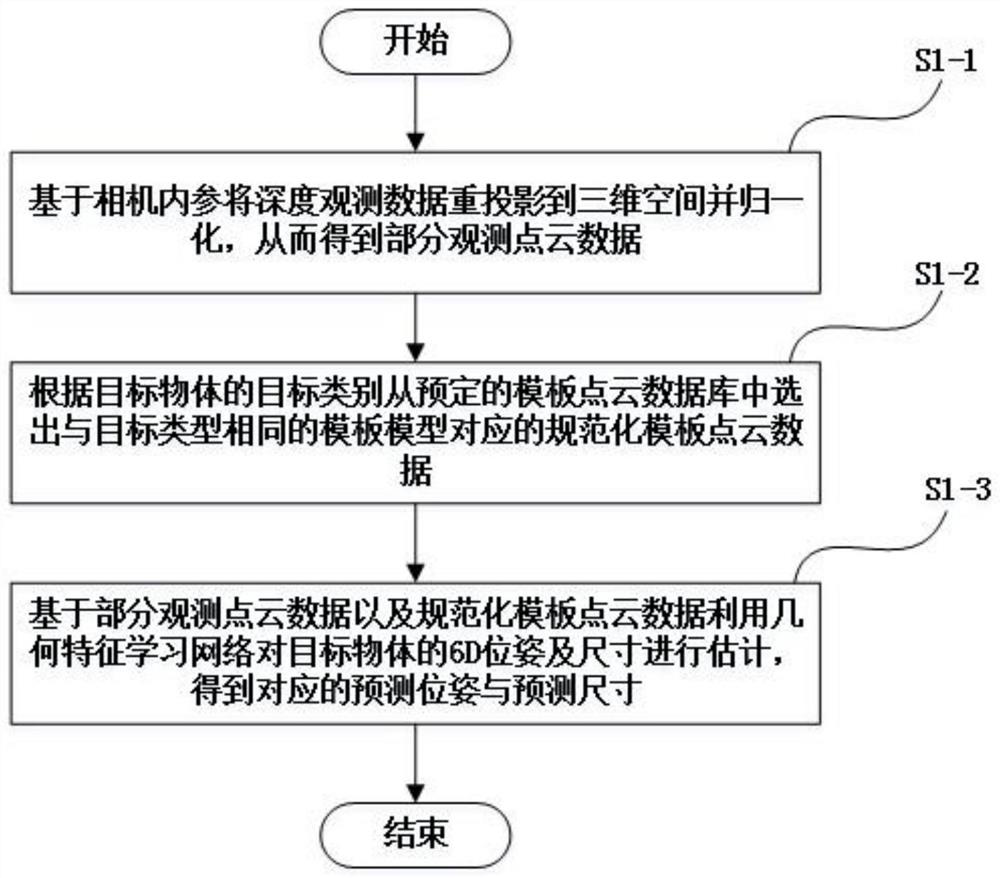
[0034] figure 1 This is a flowchart of a class-level 6D pose and size estimation method according to an embodiment of the present invention.
[0035] like figure 1 As shown, a class-level 6D pose and size estimation method includes the following steps:
[0036] In step S1-1, the depth observation data is reprojected to a three-dimensional space and normalized based on the camera internal parameters, so as to obtain part of the observation point cloud data.
[0037] The dep...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More