

Cable-strut hybrid drive spraying robot with variable working interval
A technology of spraying robot and working area, applied in manipulators, spraying devices, manufacturing tools, etc., can solve problems such as low work efficiency, poor machine movement stability, motor exposure, etc., to improve the overall rigidity of positioning, improve positioning accuracy, and ensure spraying. quality effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Obviously, the described embodiments are part of the present invention Examples, not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
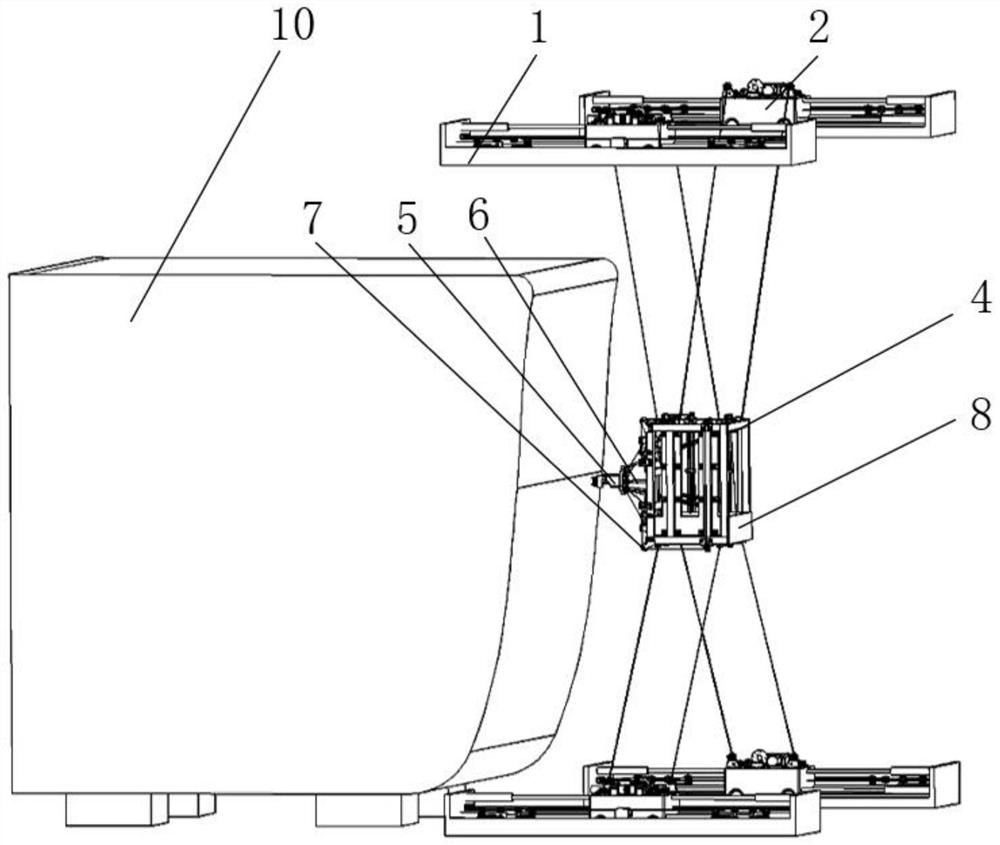
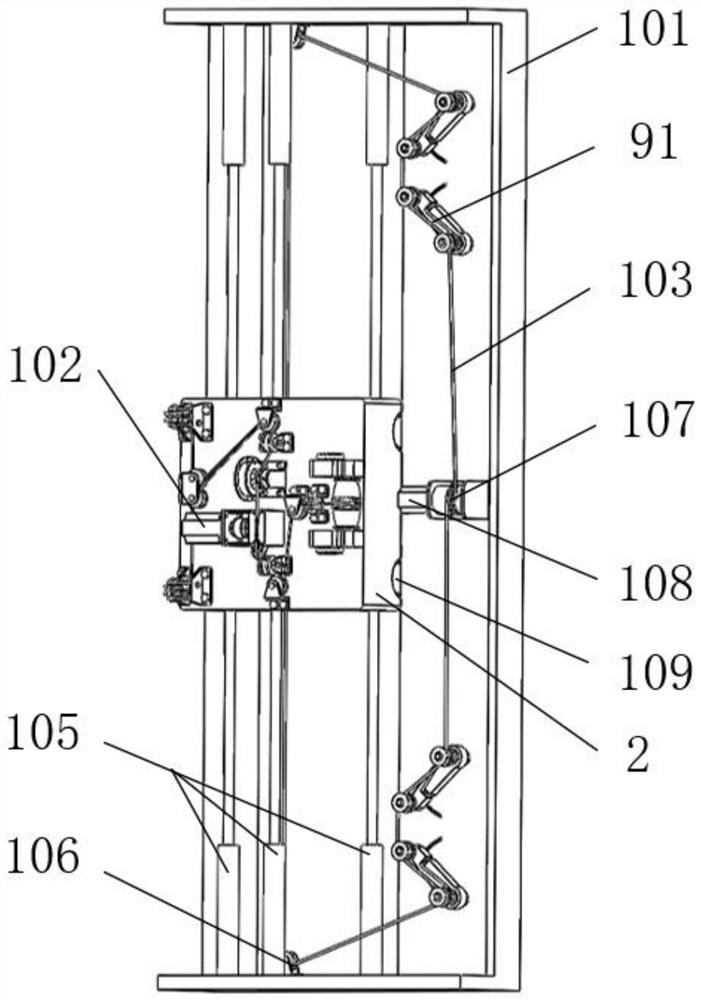
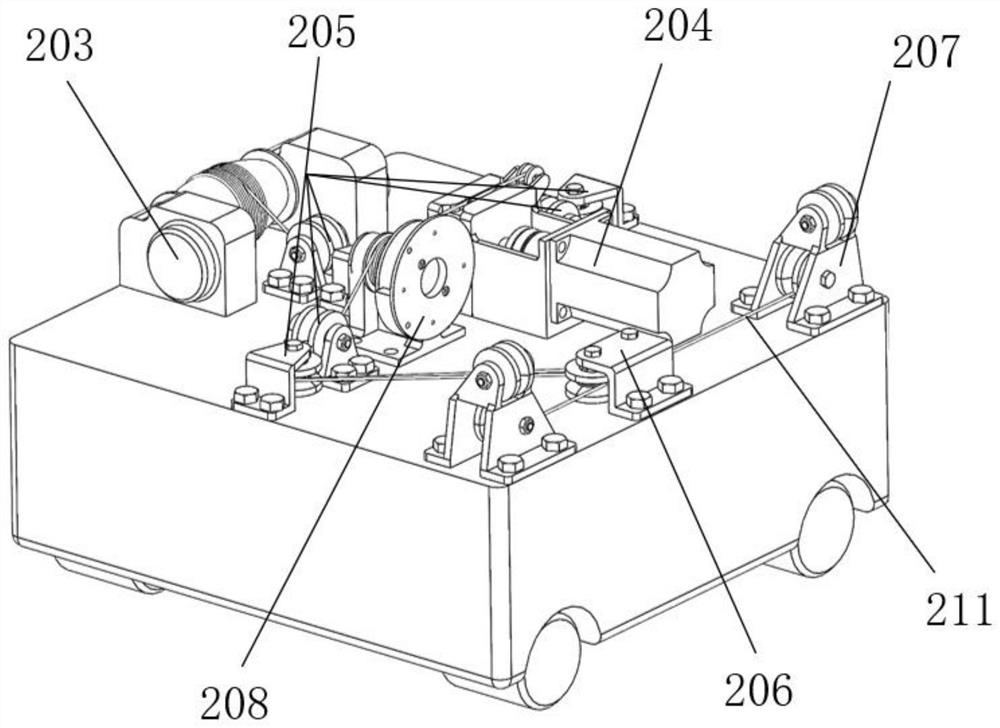
[0078] Such as Figure 1 to Figure 14 As shown, the structural relationship is as follows: the hanging basket frame 4 is a frame-shaped structure, on which is provided a motor drive mechanism 8 with the function of retracting and unwinding the rope, and also includes an end effector structure 5, an end effector angle control mechanism 6, traction and a working area The control m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More