

Fault diagnosis method without mathematical modeling of underwater robot
An underwater robot, mathematical modeling technology, applied in the direction of instruments, electrical testing/monitoring, control/regulation systems, etc., can solve problems such as difficult to diagnose, difficult and impossible to accurately model, and achieve strong universality , high diagnostic accuracy, avoid the effect of mathematical modeling process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
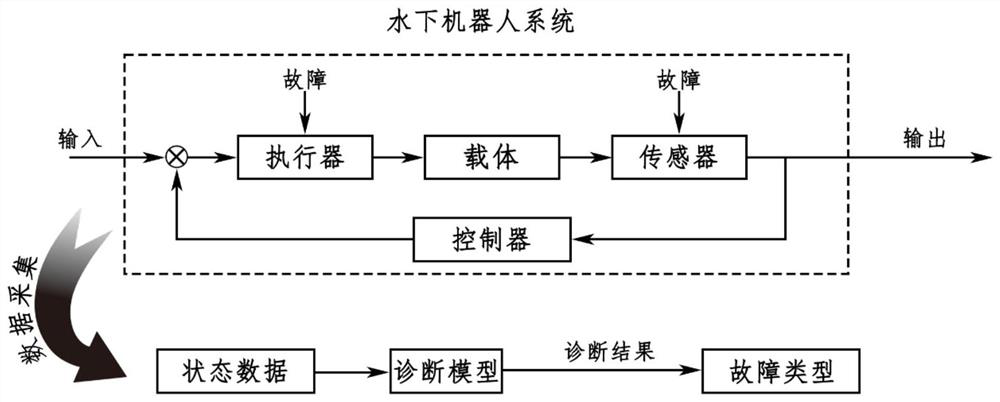
[0035] First of all, it should be explained that the diagnosis method of the present invention does not construct a mathematical model for the underwater robot itself, but focuses on the potential relationship between the state data of the underwater robot and the type of failure. Directly learning patterns between state data and fault types is fundamentally different from model-based approaches. Therefore, the present invention adopts the relevant expression of "no model".
[0036] The invention relates to underwater robot technology, deep learning technology and fault diagnosis technology. During the implementation of the present invention, the application of multiple software function modules will be involved. The applicant believes that, after carefully reading the application documents and accurately understanding the realization principle and purpose of the present invention, combined with existing known technologies, those skilled in the art can fully implement the pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More