

Low-power consumption two-foot walking moving system and walking control method thereof
A mobile system, low-power technology, applied in the field of robotics, can solve the problems of not paying attention to alternating walking movements, not deliberately detecting corners, and not passing by, and achieves wide application prospects and development potential, and the control method is simple and easy to use. low cost to manufacture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention provides a walking control method of a biped walking mobile system with low power consumption. The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
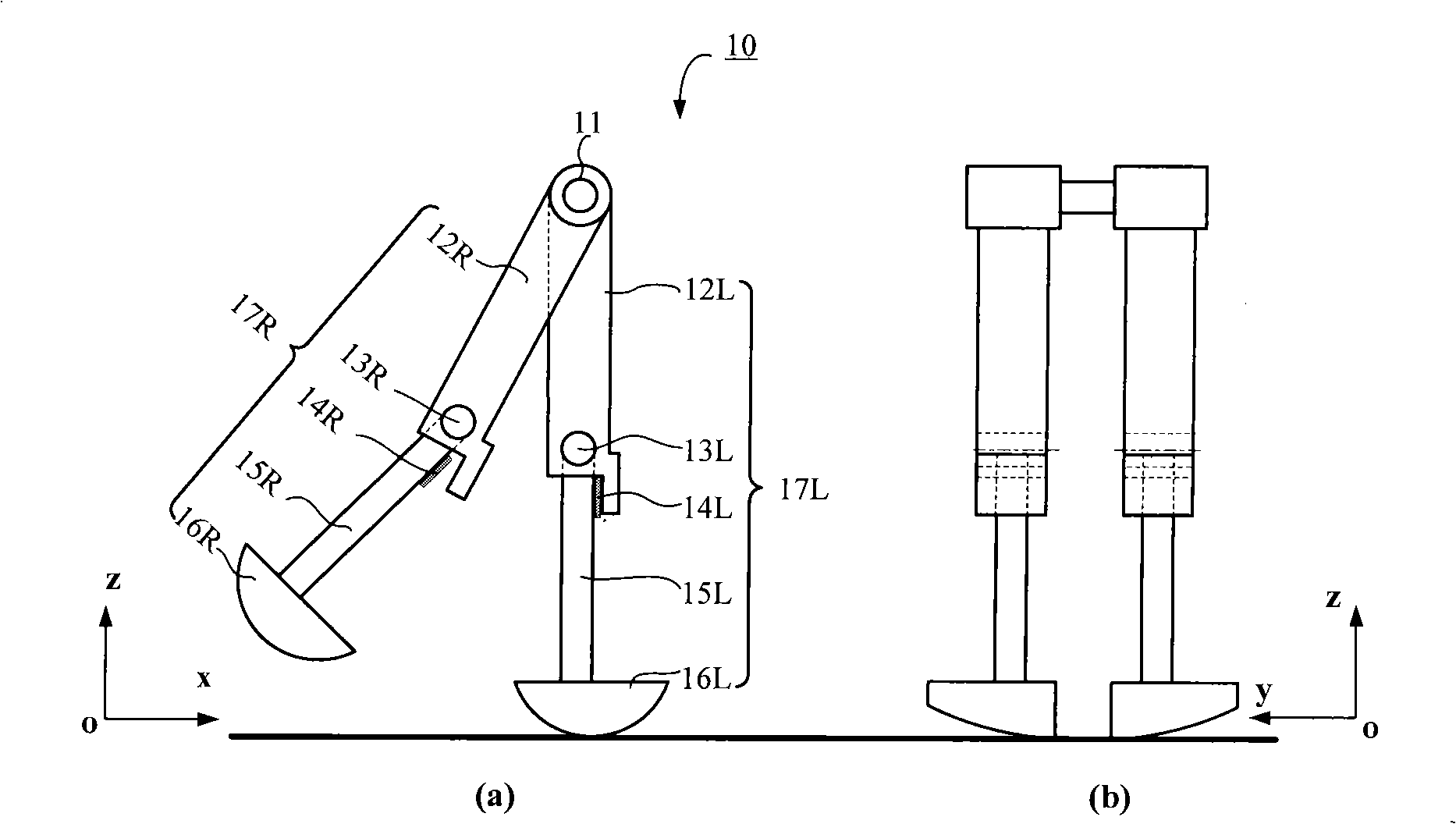
[0034] figure 1 It is a schematic diagram of the mechanical composition of the low-power biped walking mobile system of the present invention. The biped walking mobile system 10 includes a left leg 17L and a right leg 17R, which are connected by a hip joint 11; the left leg 17L is composed of a left thigh 12L and a left leg The lower leg 15L is composed of the left knee joint 13L, and the lower end of the left lower leg 15L has a left foot 16L fixed thereto; the right leg 17R is composed of the right thigh 12R and the right lower leg 15R, connected by the right knee joint 13R, and the lower end of the right lower leg 15R has The right foot 16R solidified with it; the left foot 16L and the right foot 16R have a fixed radius of cur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More