

Negative pressure adsorption wall-climbing robot
A wall-climbing robot and adsorption technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of application limitation, high energy consumption, complex structure, etc., and achieve long continuous working time, large bearing capacity, and reduced complexity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings.
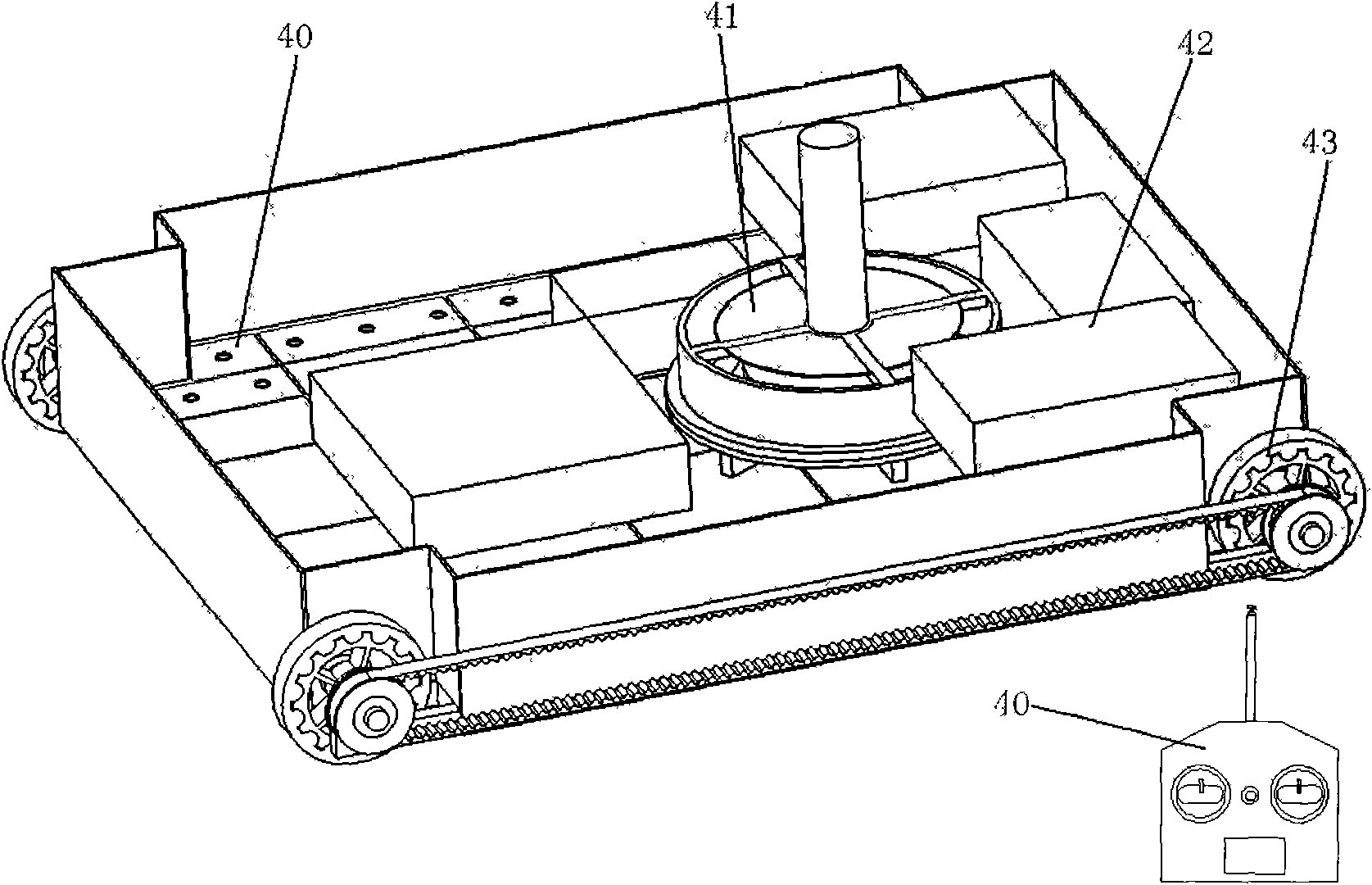
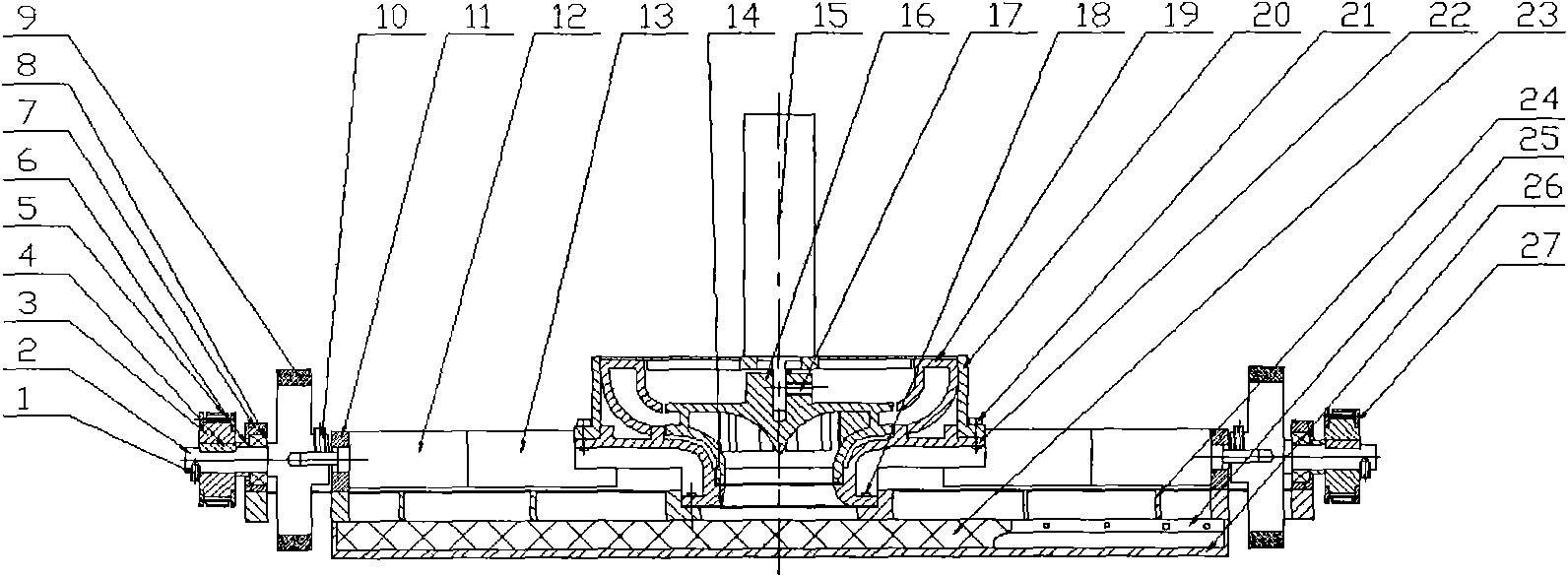
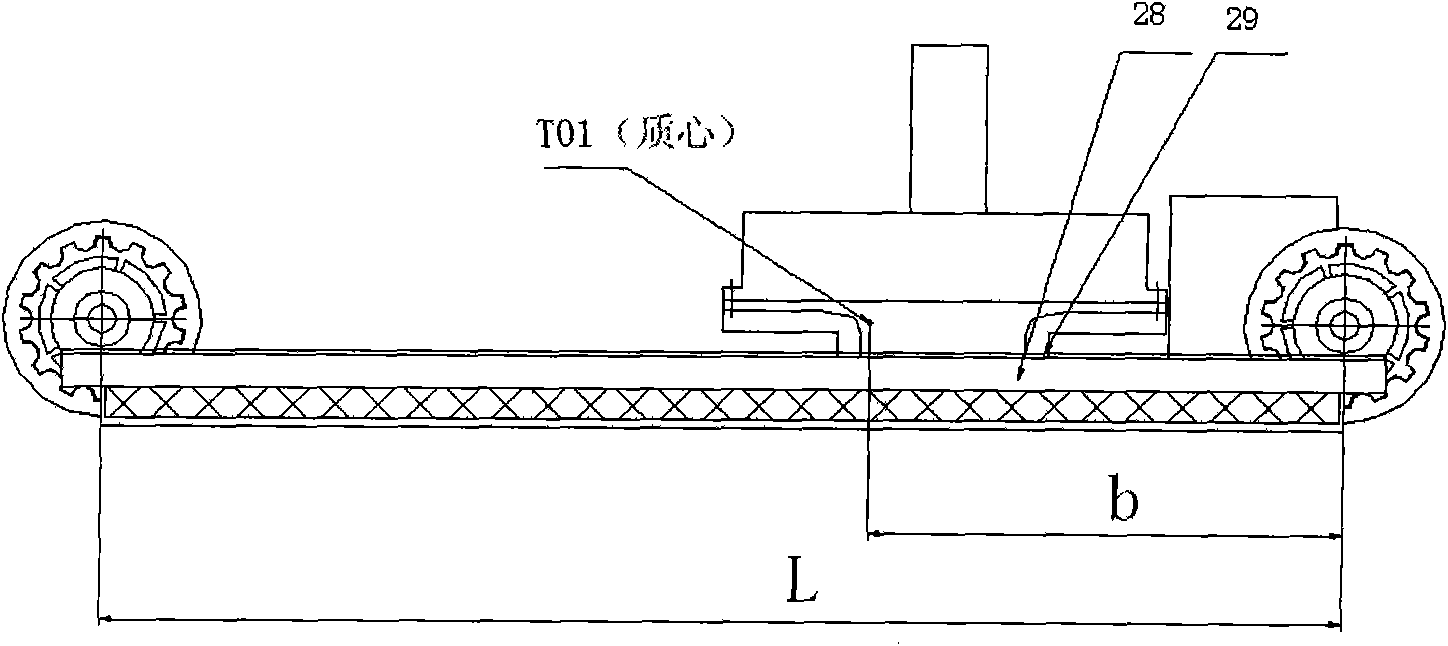
[0021] combine figure 1 and figure 2 , a kind of negative pressure adsorption type wall-climbing robot of the present invention with self-service attitude conversion function adopts modular design method, and it comprises four parts, are respectively: negative pressure generating device 41; Driving device 43; Supporting and sealing device 40 And control device 42. Wherein the negative pressure generating device 41, the control device 42, and the battery are arranged on the rear portion of the robot support base plate 24, so that the horizontal distance b from the center of mass T01 to the rear wheel rotation center is about 1 / 3 of the front and rear wheel span L, so that the robot It has the function of attitude conversion from the ground walking state to the wall climbing state by itself. The range of the ratio b / L between the distance b between the cent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More