

Inertia/vision integrated navigation method for deep-space detection patrolling device
A technology for integrated navigation and deep space exploration, which is applied to integrated navigators and other directions, and can solve problems such as low precision and poor safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
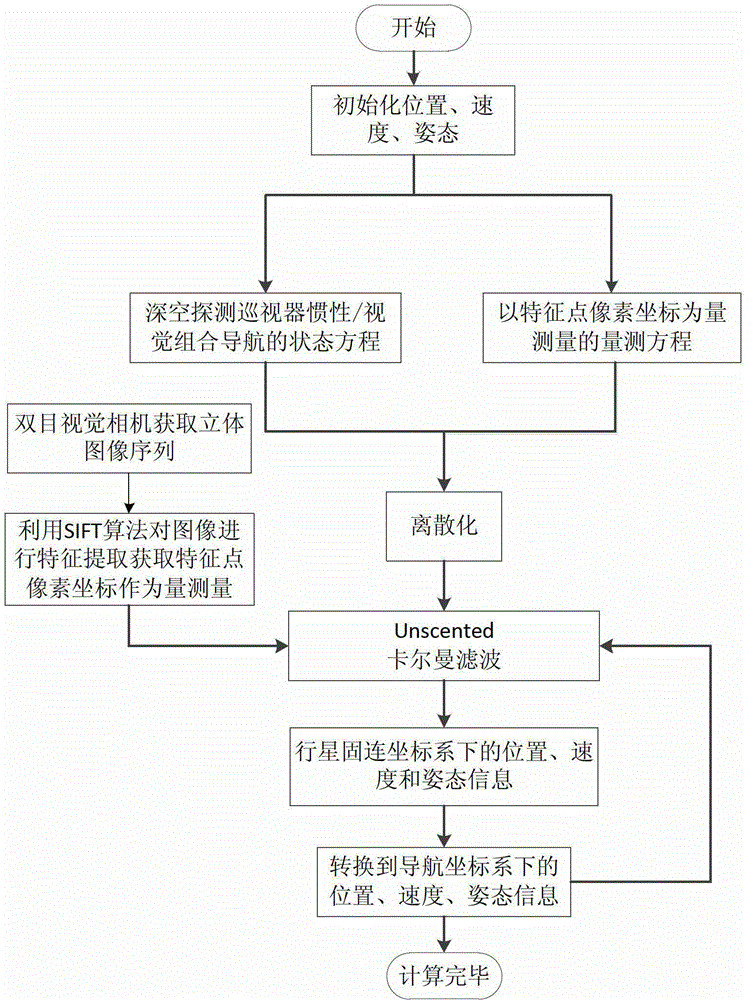
Method used
Image

Examples
Embodiment Construction
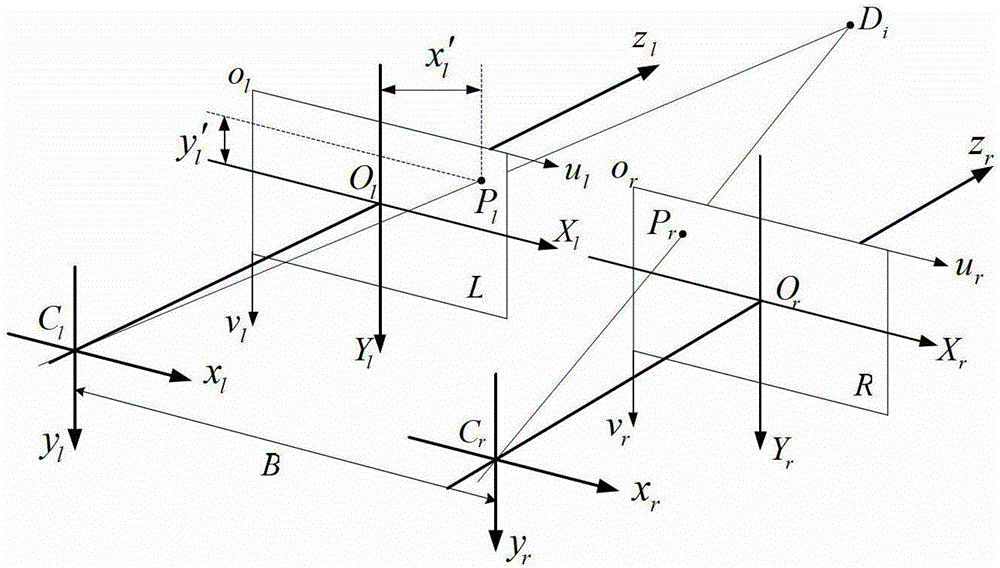
[0044] The patrol inertial / visual combined navigation method described in this embodiment involves many different coordinate systems and mutual transformations in both the state model and the measurement model. The coordinate systems are defined as follows:
[0045] ①Inertial coordinate system (o p x i the y i z i ): its origin is at the center of mass of the planet, z i axis perpendicular to the equatorial plane points to the North Pole, x i The axis points in the direction of the vernal equinox in the equatorial plane, y i axis and x i ,z i The axes form a right-handed orthogonal coordinate system.
[0046] ② Planetary fixed coordinate system (o p x p the y p z p ): its origin and z p The axis points to the same as the inertial coordinate system, x p axis points to the prime meridian in the equatorial plane, y p axis and x p ,z p The axes form a right-handed orthogonal coordinate system.
[0047] ③Planetary geodetic coordinate system (L, λ, h): The coordinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More