

Method for identifying objects in 3D point cloud data
A point cloud data, target recognition technology, applied in the field of environmental perception, can solve the problems of reducing the description accuracy, recognition accuracy discount, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
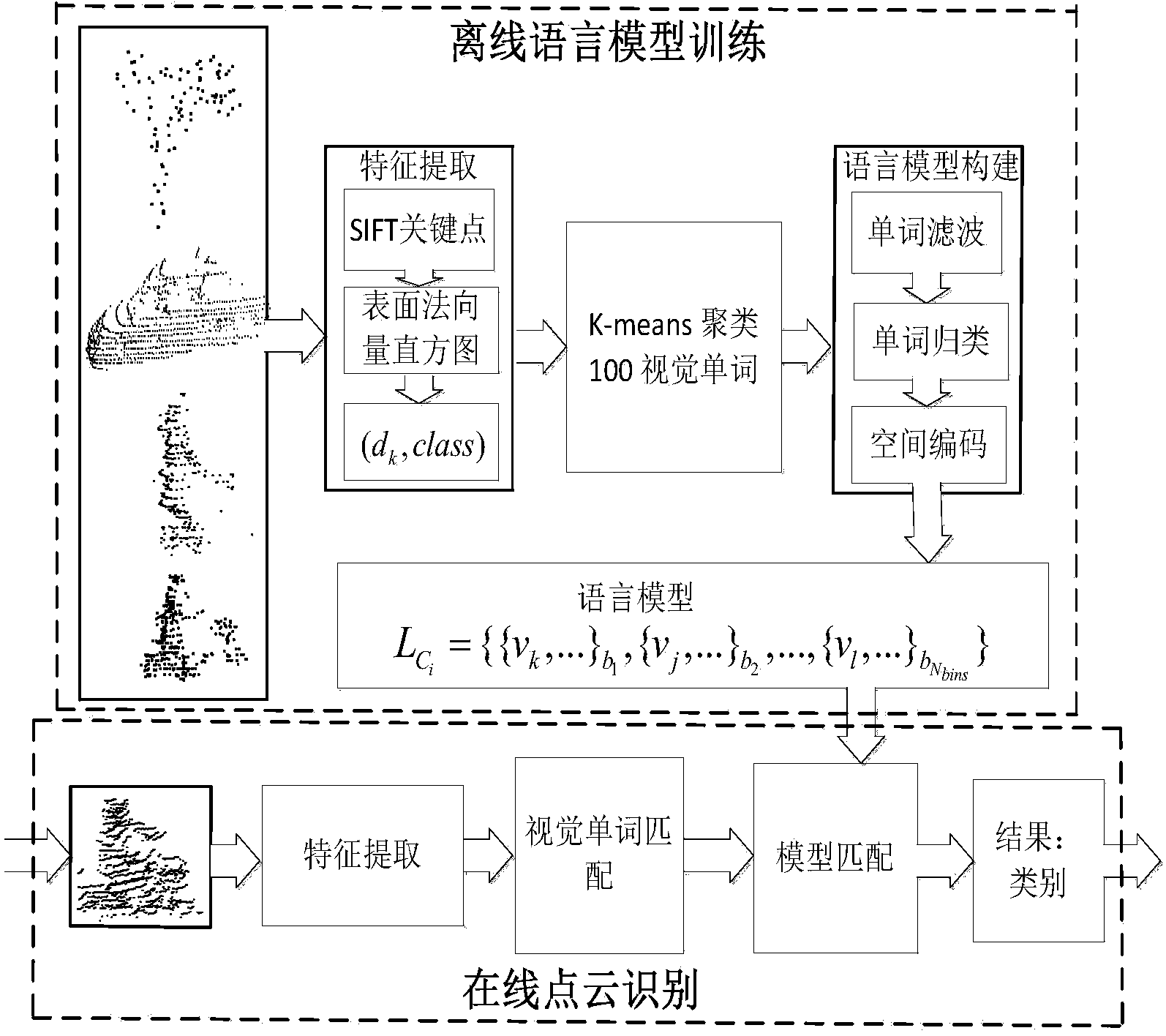
[0047] A target recognition method in 3D point cloud data based on a language model, comprising an offline language model training step and an online recognition step for an input 3D point cloud block based on the language model.
[0048] The object recognition method proposed by the present invention requires pre-marked category samples, such as figure 1 As shown, each sample can be a segmented target point cloud block from the Velodyne 3D lidar point cloud. The recognition target is also a segmented point cloud block, and each point cloud block represents an object; and the target to be recognized and the sample are sampled under the same conditions with the same sensor, and the point cloud segmentation is completed using the same point cloud segmentation method. In the actual application of unmanned vehicles, both the sample and the point cloud bl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More