

Magnetic attraction type wall-climbing robot
A wall-climbing robot and magnetic adsorption technology, applied in the field of robotics, can solve the problems of large contact area, poor comprehensive performance, and high production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
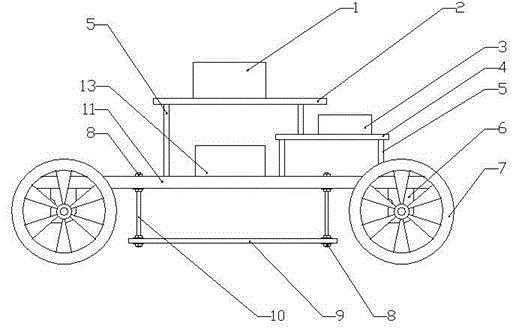
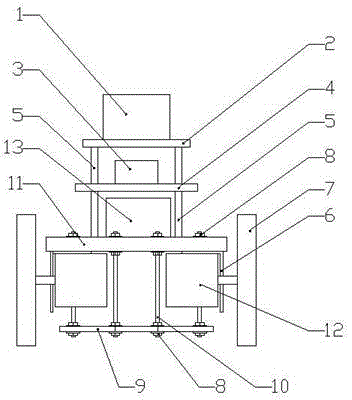
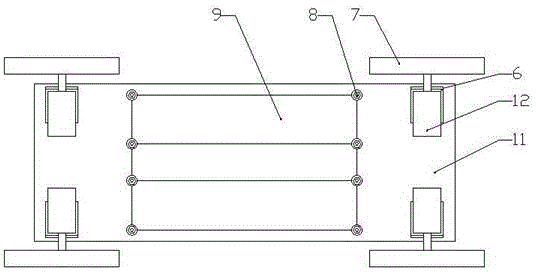
[0026] According to the needs of the actual on-site working conditions, such as: the detection and coating of the magnetic surface, assemble the magnetic adsorption wall-climbing robot, and load the relevant testing equipment or coating equipment on the robot. According to the strength of the load force required on site, the quantity of the strong magnetic blocks 9 is selected, and the strong magnetic blocks 9 are connected and fixed on the bottom of the vehicle frame 11 by screws 10 and nuts 8 . By adjusting the length of the screw 10, the distance between the strong magnetic block 9 and the vehicle frame 11 is adjusted, that is, the distance between the strong magnetic block 9 and the magnetically conductive surface, so that the adsorption force can also be adjusted. Strong magnetic piece 9 is highly apart from vehicle frame 11, and adsorption force becomes smaller, but this moment robot can cross less obstacle, and is convenient to walk on the magnetic conduction surface tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More