

Urban environment composition method for unmanned vehicles
A technology of urban environment and unmanned vehicles, applied in the field of urban environment composition of unmanned vehicles, can solve problems such as limiting the application range of algorithms, filter divergence, large number of particles, etc., achieve high autonomy and anti-interference ability, and avoid calibration and error, the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below with reference to the accompanying drawings and examples.
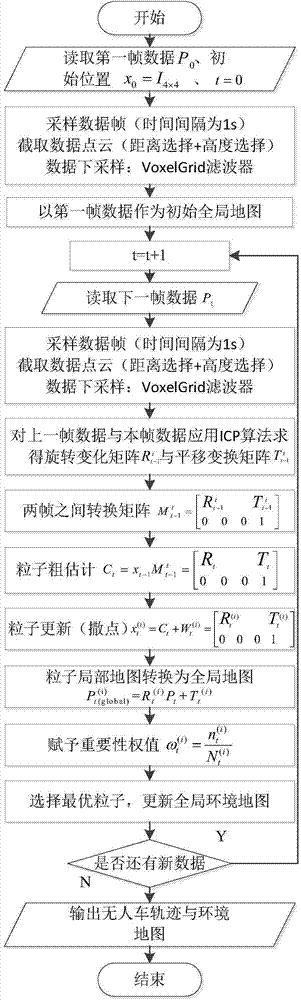
[0036] The invention discloses a 3D laser point cloud-based urban environment composition method for unmanned vehicles, such as figure 1 As shown, it includes three parts: data preprocessing, motion update and observation update. Among them, the motion update uses the ICP algorithm to achieve rough estimation, and the pose estimation is based on Gaussian distribution. The observation update includes two parts: the particle weight and the global map update.
[0037] In the data preprocessing, an effective point cloud frame is selected first. The frequency of lidar is 10Hz, that is, 10 frames of data are returned per second. If each frame of data is processed, a large amount of redundant data will bring a heavy burden to the algorithm. The data frames are sampled at equal time intervals, and the subsequent point cloud matching algorithm ICP is sensitive to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More