

Method and system for returning of unmanned plane
A technology of UAV and return path, which is applied in the field of aircraft, can solve the problems of increasing the difficulty of return, and achieve the effect of avoiding the risk of obstacles, simplifying the operation process and improving competitiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
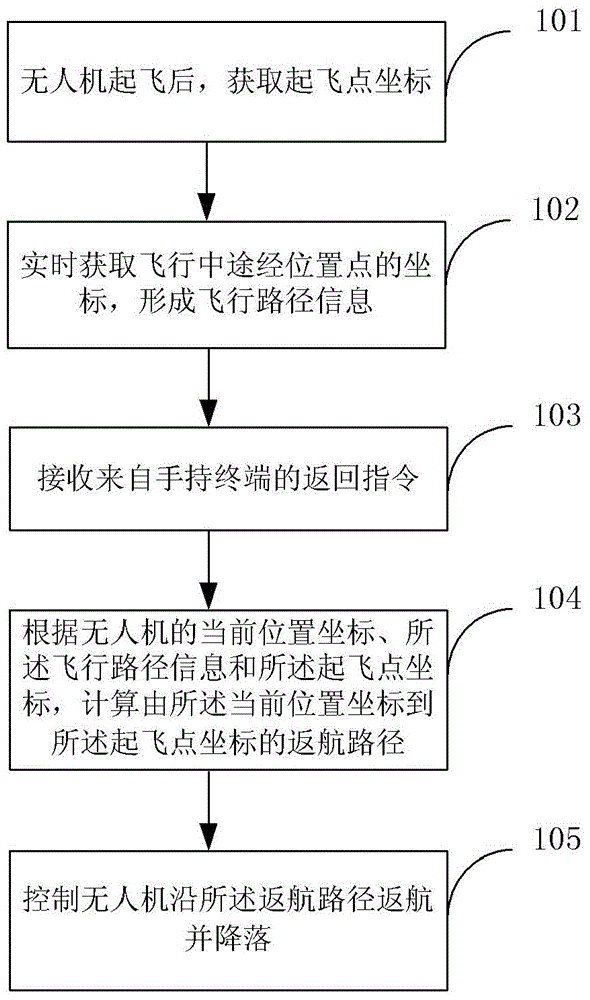
[0034] figure 1 It is a flow chart of the steps of a method embodiment of the present invention, such as figure 1 As shown, the embodiment of the present invention provides a method for returning a UAV, including:
[0035] Step 101, after the drone takes off, obtain the coordinates of the take-off point;
[0036] Step 102, planning and recording the flight path, obtaining the coordinates of the passing location points during the flight in real time, and forming flight path information;
[0037] Step 103, receiving a return instruction from the handheld terminal;
[0038] Step 104, according to the current position coordinates of the UAV, the flight path information and / or the take-off point coordinates, calculate the return path from the current position coordinates to the take-off point coordinates;
[0039] Step 105, controlling the UAV to return and land along the return path.
[0040] It can be seen from the above that in the embodiment of the present invention, the UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More