

UWB-positioning-based intelligent automobile transfer robot and control method thereof
A technology for handling robots and smart cars, which is applied in the field of smart car handling robots and its control, which can solve the problems of increasing car space, safety accidents, and increasing time, and achieve the effects of reducing operating steps, simplifying positioning and navigation, and reducing safety risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
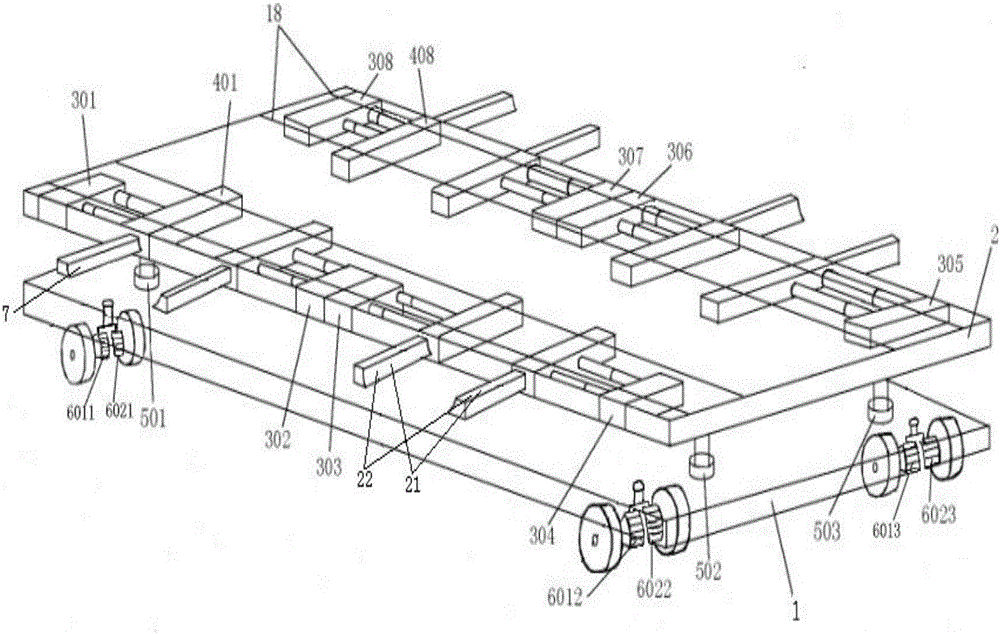
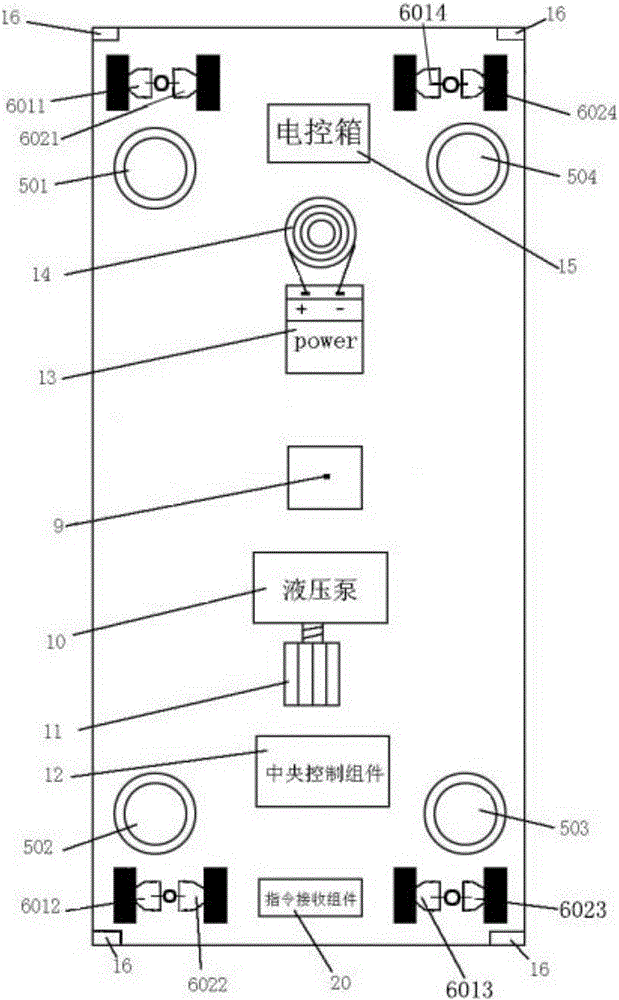
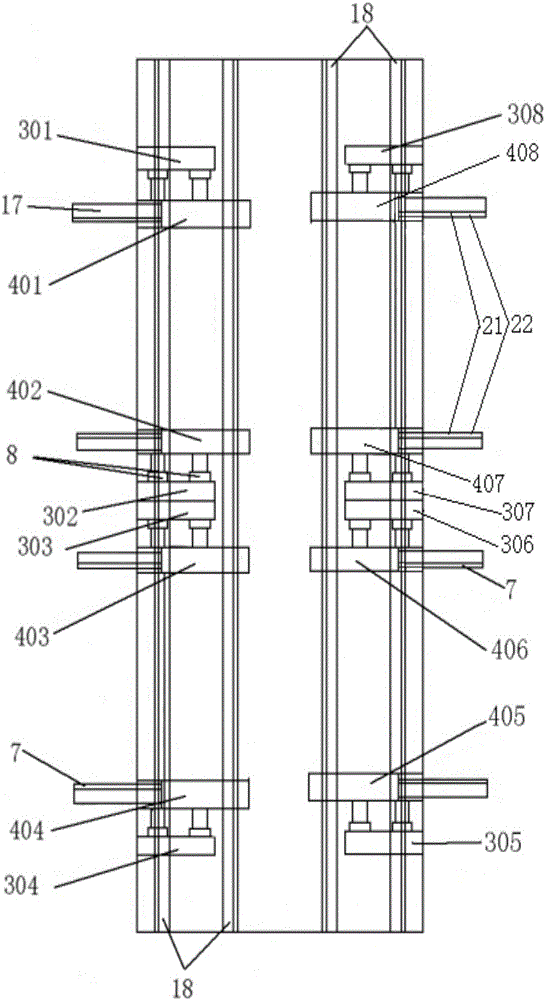
[0052] An intelligent vehicle handling robot, the handling robot includes a vehicle frame, a controlled universal wheel set arranged on the vehicle frame, a clamping arm mechanism and an electrical control system. The handling robot also includes a wireless instruction information receiving component, a central control module, a battery component, a wireless charging management component, a sensor component, and a safety collision avoidance monitoring component. The universal wheel set and the clamping arm mechanism are all connected with the electric control system. Both the electrical control system and the wireless instruction information receiving component are connected to the central control module.
[0053] The navigation method of the handling robot adopts a high-precision map navigation method, and the high-precision map is generated by collec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More