

Variable geometry truss modeling positioning method
A positioning method and variable geometry technology, applied in geometric CAD, special data processing applications, instruments, etc., can solve problems such as inaccurate operation accuracy and ultra-close tracking loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The embodiments of the present invention are described in detail below: the present embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation and specific operation process are provided, but the protection scope of the present invention is not limited to the following implementation example.
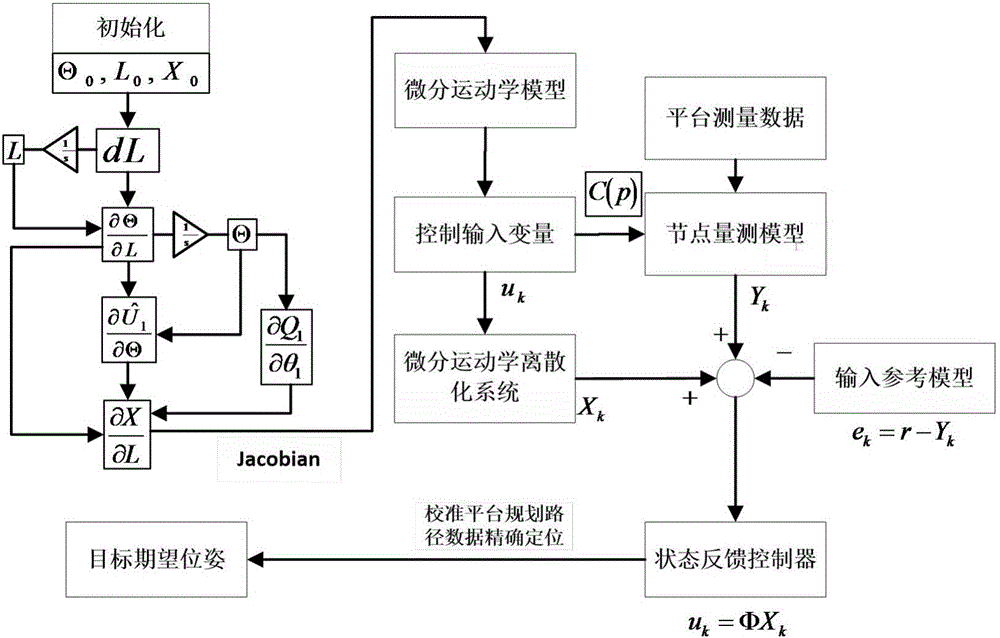
[0080] Such as figure 1 As shown, the precise positioning method based on the variable geometry truss differential kinematics model provided in this embodiment is actually tested on two aspects of data through MATLAB simulation data and semi-physical simulation image data. The implementation steps are as follows:
[0081] Step 1, firstly initialize the input parameters respectively.
[0082] Using the main parameter θ 0 , L 0 , X 0 , θ 0 Indicates that the corresponding angle parameter set Θ={θ 1 ,θ 2 ,θ 3} initial state, L 0 Indicates that the length parameter set L={L corresponding to the active rod 1 ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More