

Exoskeleton hybrid control system and method for lower limb walking aid machine
A technology of hybrid control and exoskeleton, which is applied in the direction of program-controlled manipulators, appliances that help people walk, and manipulators. It can solve the problems of system parameter identification and insufficient use of servo technology, so as to ensure coupling relationship, good human-computer interaction, and enhanced The effect of the learning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
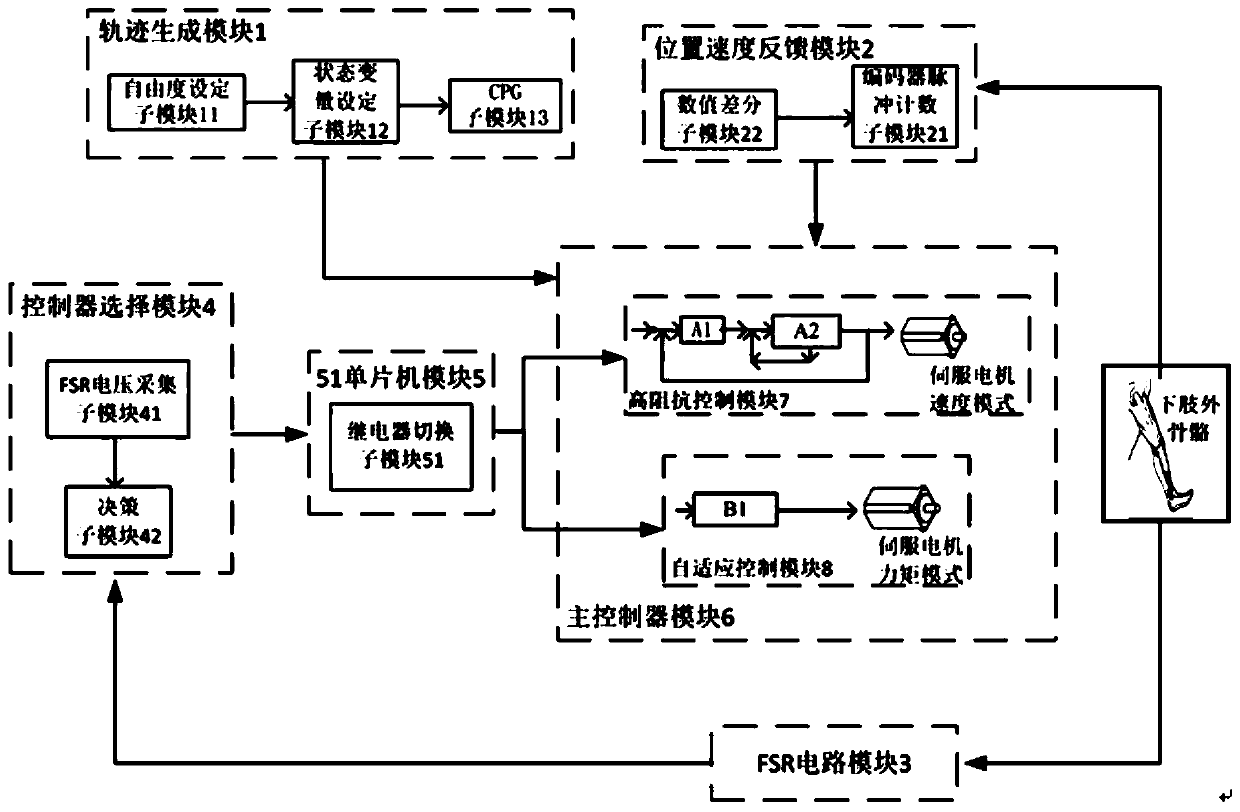
[0029] The exoskeleton hybrid control system of the lower limb walking aid machine provided by the present invention is configured with different controllers for different biomechanical tasks in the walking gait cycle. figure 1 The control block diagram of the overall invention is shown, and the present invention includes a track generation module 1, a position speed feedback module 2, an FSR (feedback shift register) circuit module 3, a controller selection module 4, a 51 single-chip microcomputer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More