

A plane-aware intersection traffic signal control method and system capable of taking into account non-motorized vehicles
A non-motor vehicle and traffic signal technology, applied in the field of intelligent transportation, can solve the problem that the control mode of the signal light cannot be combined with the traffic efficiency of non-motor vehicles and motor vehicles, and the loss of green light time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
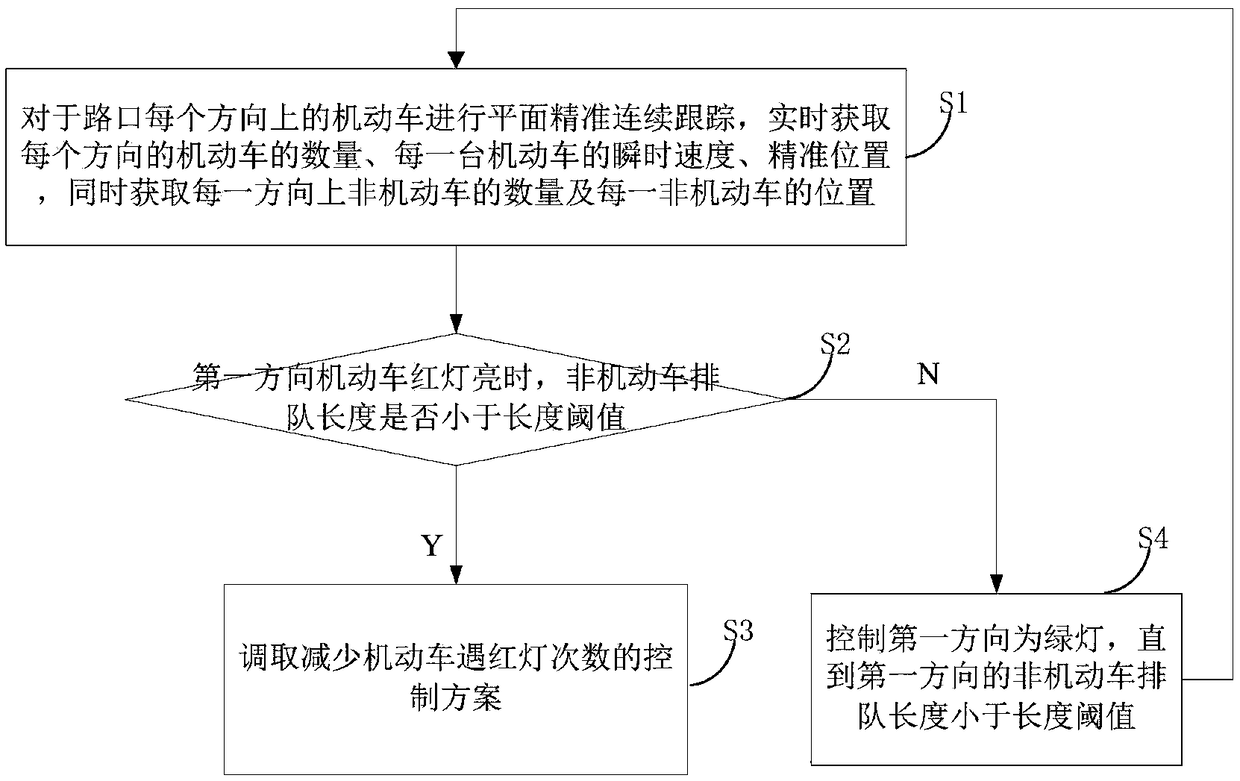
[0084] This embodiment provides a plane-aware intersection traffic signal control method that can take into account non-motor vehicles, such as figure 1 shown, including the following steps:
[0085]S1: Plane accurate and continuous tracking of motor vehicles in each direction of the intersection, real-time acquisition of the number of motor vehicles in each direction, the instantaneous speed and precise position of each motor vehicle, and acquisition of non-motor vehicles in each direction at the same time Quantity and precise location.
[0086] S2: When the red light in the first direction is on, determine whether the queue length of non-motorized vehicles is less than the set length threshold; if so, go to step S3; otherwise, go to step S4.
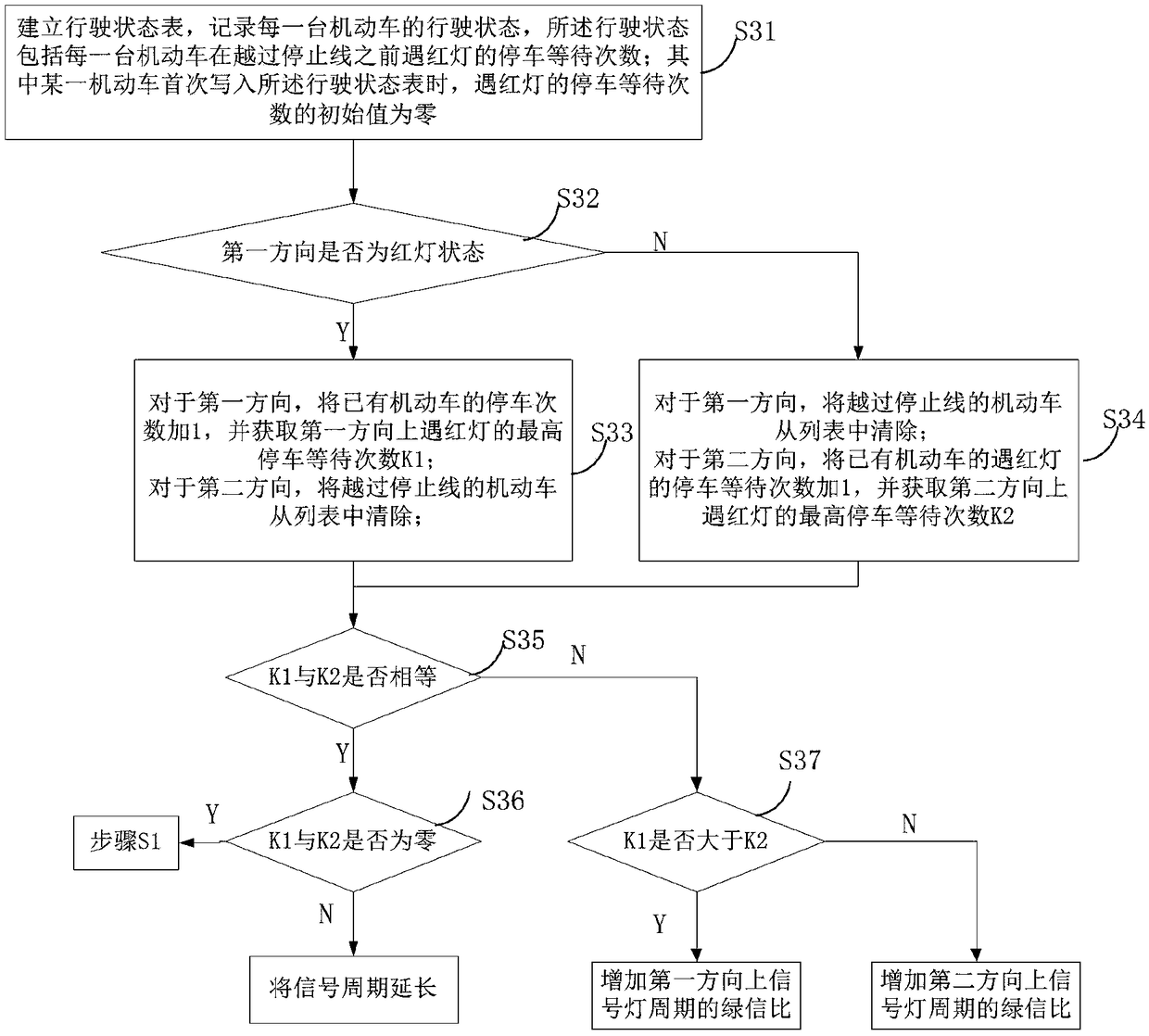
[0087] S3: Retrieve the control scheme for reducing the number of times motor vehicles encounter red lights.
[0088] S4: Control the first direction to be a green light until the queue length of bicycles in the first direction is le...
Embodiment 2
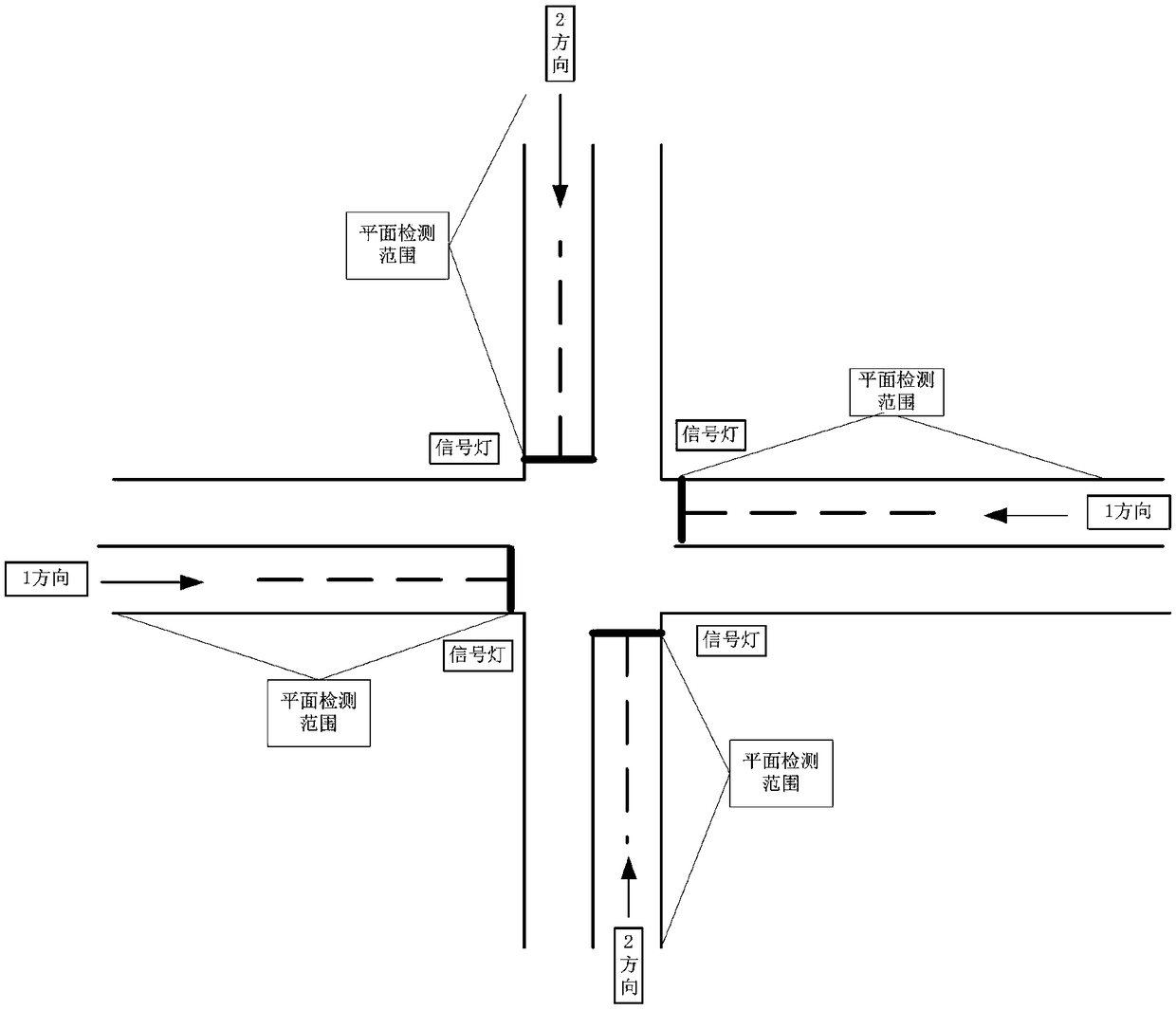
[0109] In this embodiment, on the basis of Embodiment 1, the following improvements are made. The precise and continuous tracking of the plane described in step S1 includes the following steps:
[0110] S11: Set several plane detectors on the intersection, and the plane detectors are used for continuous tracking of motor vehicles; mark the detection range of the plane detectors, the upstream section of the stop line, and the downstream section of the stop line with latitude and longitude on the electronic map, and the position coordinate data of the plane detector (X j ,Y j ) marked on the electronic map;
[0111] S12: Obtain the current detection error (X c ,Y c ), judge the current detection error (X c ,Y c ) is within the set threshold range, if so, enter step S13; otherwise, an alarm signal is sent to indicate that the coordinate data of the correction flag position cannot be accurately obtained, and then the signal control mode is downgraded and then returned to step...
Embodiment 3
[0137] This embodiment provides a plane-aware intersection traffic signal control system that can take into account non-motor vehicles, such as Figure 6 shown, including:
[0138] Tracking unit 1, which conducts plane accurate and continuous tracking of motor vehicles in each direction of the intersection, and obtains the number of motor vehicles in each direction, the instantaneous speed and precise position of each motor vehicle in real time, and simultaneously obtains the non-machine The number and precise location of the train;
[0139] The first judging unit 2 judges whether the queue length of bicycles is less than a set threshold when the red light in the first direction is on;
[0140] The first control unit 3, when the judgment result of the first judging unit 2 is yes, transfers a control scheme for reducing the number of times the motor vehicle encounters a red light;
[0141] The second control unit 4, when the judgment result of the first judging unit 2 is nega...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More